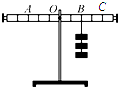
 小畅“探究杠杆平衡条件”时,用的每个钩码质量均为50g,杠杆上刻线均匀.实验前,她先将杠杆调在水平位置静止,目的是________和________.杠杆水平平衡后,她在杠杆B点挂了3个钩码,如图.为使杠杆保持水平平衡,应在A点挂________个钩码;若用测力计钩在C点竖直向上拉,杠杆水平平衡时,读数应为________N.
小畅“探究杠杆平衡条件”时,用的每个钩码质量均为50g,杠杆上刻线均匀.实验前,她先将杠杆调在水平位置静止,目的是________和________.杠杆水平平衡后,她在杠杆B点挂了3个钩码,如图.为使杠杆保持水平平衡,应在A点挂________个钩码;若用测力计钩在C点竖直向上拉,杠杆水平平衡时,读数应为________N. =0.75N.
=0.75N.
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案科目:初中物理 来源: 题型:
 小畅“探究杠杆平衡条件”时,用的每个钩码质量均为50g,杠杆上刻线均匀.实验前,她先将杠杆调在水平位置静止,目的是
小畅“探究杠杆平衡条件”时,用的每个钩码质量均为50g,杠杆上刻线均匀.实验前,她先将杠杆调在水平位置静止,目的是查看答案和解析>>
科目:初中物理 来源: 题型:
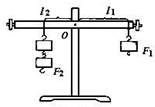
 小华探究杠杆平衡条件时,所用的每个钩码重1N,杠杆上相邻刻线间的距离相等.小华将杠杆调节水平平衡后,在杠杆上的B点悬挂了3个钩码,测力计通过细绳拉杠杆的A点,使杠杆平衡(如图所示).
小华探究杠杆平衡条件时,所用的每个钩码重1N,杠杆上相邻刻线间的距离相等.小华将杠杆调节水平平衡后,在杠杆上的B点悬挂了3个钩码,测力计通过细绳拉杠杆的A点,使杠杆平衡(如图所示).查看答案和解析>>
科目:初中物理 来源: 题型:
 小华探究杠杆平衡条件时,使用的每个钩码的质量均为50g,杠杆上相邻刻线间的距离相等.小华调节杠杆两端的
小华探究杠杆平衡条件时,使用的每个钩码的质量均为50g,杠杆上相邻刻线间的距离相等.小华调节杠杆两端的查看答案和解析>>
科目:初中物理 来源: 题型:
 如图所示,是小刚探究“杠杆平衡条件”的步骤:
如图所示,是小刚探究“杠杆平衡条件”的步骤:| 实验序号 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
| 1 | 3.5 | 0.2 | 2 | 0.35 |
| 2 | 3 | 0.15 | 4.5 | 0.1 |
| 3 | 2.5 | 0.2 | 2 | 0.25 |
| 4 | 2 | 0.2 | 1 | 0.1 |
| 5 | 1.5 | 0.1 | 1 | 0.15 |
| 6 | 1 | 0.08 | 2 | 0.04 |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com