【题目】如图所示,灯光A、B完全相同,L是自感系数很大的线圈,其自身电阻与定值电阻R相等,下列说法正确的是( )
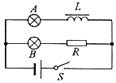
A. 闭合电键S瞬间,灯泡A、B两灯泡都慢慢变亮
B. 闭合电键S,当电路稳定后,灯泡A、B的亮度不同
C. 断开电键S时,灯泡A、B均缓慢熄灭
D. 断开电键S时,灯泡A缓慢熄灭,灯泡B立即熄灭
科目:高中物理 来源: 题型:
【题目】(10分)质量分别为m1和m2的两个小物块用轻绳连接,绳跨过位于倾角α=30°的光滑斜面顶端的轻滑轮,滑轮与转轴之间的摩擦不计,斜面固定在水平桌面上,如图所示。第一次,m1悬空,m2放在斜面上,用t表示m2自斜面底端由静止开始运动至斜面顶端所需的时间。第二次,将m1和m2位置互换,使m2悬空,m1放在斜面上,发现m1自斜面底端由静止开始运动至斜面顶端所需的时间为![]() 。求m1与m2之比。
。求m1与m2之比。
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】下列几种情景,请根据所学知识选择对情景分析和判断的正确说法
①点火后即将升空的火箭 ②高速公路上沿直线高速行驶的轿车为避免事故紧急刹车
③运动的磁悬浮列车在轨道上高速行驶 ④太空的空间站在绕地球做匀速圆周运动
A. 因火箭还没运动,所以加速度一定为零
B. 轿车紧急刹车,速度变化很快,所以加速度很大
C. 高速行驶的磁悬浮列车,因速度很大,所以加速度也一定很大
D. 尽管空间站做匀速圆周运动,加速度也不为零
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】随着全世界开始倡导低碳经济的发展,电动自行车产品已越来越受到大家的 青睐,某同学为了测定某电动车电池的电动势和内电阻,设计了如图所示电路,提供的实验 器材有:

(A)电动车电池一组,电动势约为 12V,内阻未知
(B)直流电流表量程 300mA,内阻很小
(C)电阻箱 R,阻值范围为 0~999.9Ω
(D)定值电阻 R0,阻值为 10Ω
(E)导线和开关
(1)当他闭合开关时发现,无论怎样调节变阻器,电流 表 都没有示数,反复检查后发现电路连接完好, 估计是某一 元件损坏,因此他拿来多用电表检查故障,他的操作如下:

①断开电 源开关 S
②将多用表选择开关置于×1Ω档,调零后,
红黑表笔分别接 R0 两端,读数为 10Ω
③将多用表选择开关置于×10Ω档,调零后,将红黑表笔分别接电阻箱两端,发现指针读数如图所示,则所测阻值为_____Ω,然后又用多用电表分别对电源和开关进行检测,发现电源和开关均完好.由以上操作可知,发生故障的元件是___.
(2)在更换规格相同的元件后重新连接好电路.
(3)改变电阻箱的阻值 R,分别测出阻值为
![]() =10Ω的定值电阻的电流 I,表中三组关于
=10Ω的定值电阻的电流 I,表中三组关于
R 的取值方案中,比较合理的方案是___(选填方案编号 1、2 或 3).
(4)根据实验数据描点,绘出![]() 的图象是一条直线。若直线的斜率为
的图象是一条直线。若直线的斜率为![]() ,在
,在![]() 坐标轴上的截距为
坐标轴上的截距为![]() ,则该电源的电动势 E=___,内阻 r =___(用 k、b 和
,则该电源的电动势 E=___,内阻 r =___(用 k、b 和![]() 表示).
表示).

查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】在真空中有正方体玻璃砖,其截面如图所示,已知它的边长为2d,在AB面上方有一单色点光源S,从S发出的光线从AB面中点P以60射入玻璃砖,从AD面的Q点(Q未标记)射出,且射出时出射光线偏离入射光线SP的偏向角为30。已知光在真空中传播速度为c。
(i)求光从P传播到Q所用时间?
(ii)若将光源S顺时针旋转至某一角度,仍然从P点入射,在AD面的N点恰好发生全反射,求N、Q两点间距离?

查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】匀强磁场中,矩形金属线框绕与磁感线垂直转轴匀速转动,如图1所示,产生的交变电动势的图象如图2所示,则( )
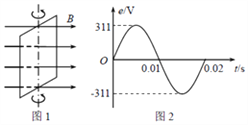
A. t=0.015s时线框的磁通量为零
B. t=0.01s时线框的磁通量最小
C. 线框产生的交变电动势有效值为311V
D. 线框产生的交变电动势的有效值为220V
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】气垫导轨是一种实验辅助仪器,利用它可以非常精确地完成多个高中物理实验,滑块在导轨上运动时,可认为不受摩擦阻力,现利用气垫导轨验证动量守恒定律,实验装置如图
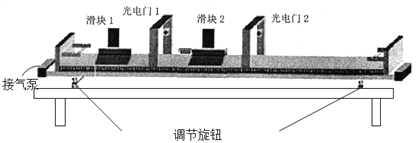
(1)对导轨进行调节平衡,使气垫导轨和光电门都正常工作,在导轨上只放置滑块1.调整调节旋钮,轻推滑块,观察滑块通过两光电门的时间,当___________________时,说明导轨已经水平.
(2)使用天平测得滑块1、2质量分别为m1、m2,然后按如图所示方式放在气垫导轨上.使滑块1获得向右的速度,滑块1通过光电门1后与静止的滑块2碰撞并粘在一起,遮光条通过光电门1、2的时间分别为t1、t2,则上述物理量间如果满足关系式 _______,则证明碰撞过程中两滑块的总动量守恒.
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
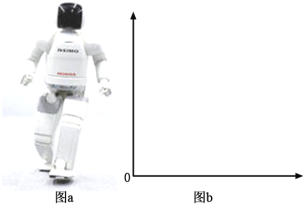
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示,两列简谐横波分别沿x轴正方向和负方向传播,两波源分别位于x=-0.2 m和x=1.2 m处,两列波的速度均为v=0.2 m/s,两波源的振幅均为A=2 cm.图示为t=0时刻两列波的图像(传播方向如图所示),此时平衡位置处于x=0.2 m和x=0.8 m的P,Q两质点刚开始振动.质点M的平衡位置处于x=0.5 m处,关于各质点运动情况下列判断不正确的是( )
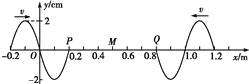
A. 质点P的起振方向沿y轴负方向
B. t=1.5 s时刻,质点P运动到M点
C. t=1.5 s时刻,质点M开始振动
D. t=3 s时刻,质点M的位移为4 cm
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
