【题目】如图是自动驾驶汽车里测量汽车水平运动加速度的装置。该装置在箱的前、后壁各安装一个压力传感感器a和b,中间用两根相同的轻质弹簧压着一个质量为2.0kg的滑块,滑块可无摩擦滑动(弹簧的弹力与其形变量成正比)。汽车静止时,传感器a、b示数均为10N.若当传感器b示数为8N时,汽车的加速度大小为_____m/s2,方向是_____(选填:“由a指向b”或“由b指向a”)。

科目:高中物理 来源: 题型:
【题目】如图所示,有一个可视为质点的质量为m=1kg的小物块,从光滑平台上的A点以v0=3m/s的初速度水平抛出,到达C点时,恰好沿C点的切线方向进入固定在水平地面上的圆弧轨道,最后小物块滑上紧靠轨道末端D点的质量为M=3kg的长木板,已知木板上表面与圆弧轨道末端切线相平,木板下表面与水平地面之间光滑,物块在D点对轨道的压力大小为60N,小物块与长木板间的动摩擦因数μ=0.3,圆弧轨道的半径为R=0.5m,C点和圆弧的圆心连线与竖直方向的夹角θ=53°,不计空气阻力,g取10m/s2.(sin53°=0.8,cos53°=0.6)求:
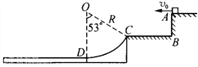
(1)AC两点的高度差;
(2)要使小物块不滑出长木板,木板的长度L至少多大?
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图,MN、PQ为足够长的平行金属导轨,间距L=0.2m,导轨平面与水平面间夹角370,N、Q间连接一个电阻R=0.1Ω,匀强磁场垂直于导轨平面向上,磁感应强度B=0.5T,一根质量m=0.03kg的金属棒正在以速度v=1.2m/s的速度沿导轨匀速下滑,下滑过程中始终与导轨垂直,且与导轨接触良好金属棒及导轨的电阻不计,求:

(1)电阻R中电流的大小;
(2)金属棒与导轨间的滑动摩擦因数的大小;
(3)如果从某时刻开始对金属棒施加一个垂直于金属棒且沿导轨平面向上的恒定拉力F=0.2N,金属棒将继续下滑x=0.14m后速度恰好减为0,则在金属棒减速过程中电阻R中产生的焦耳热为多少?
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示为大型电子地磅电路图,电源电动势为E,内阻不计.不称物体时,滑片P滑到A端,滑动变阻器接入电路的有效电阻最大,电流较小;称重物时,在压力作用下使滑片P下滑,滑动变阻器有效电阻变小,电流变大,这样把电流对应的重量值刻在刻度盘上,就可以读出被称物体的重量值,若滑动变阻器上A、B间距离为L,最大阻值等于电阻阻值R0,已知两只弹簧的总弹力与形变量成正比,其比例系数为k,所称重物的重量G与电流大小I的关系为

A. G=2kL+![]() B. G=2kL-
B. G=2kL-![]()
C. G=![]() +kL D. G=kIL
+kL D. G=kIL
查看答案和解析>>
科目:高中物理 来源: 题型:
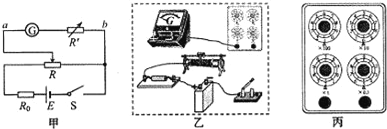
【题目】现有一只量程3mA、内阻约为100Ω的灵敏电流表(表头).为了较准确地测量它的内阻,采用了如图甲所示的实验电路,实验室提供的器材除电源(电动势为2V,内阻不计)、电阻箱(最大阻值为999.9Ω)、开关和若干导线外,还有多个滑动变阻器和定值电阻可供选择(如表).
A.滑动变阻器R1(0~5Ω,1A) | D.定值电阻R01(阻值为200Ω) |
B.滑动变阻器R2(0~200Ω,0.5A) | E.定值电阻R02(阻值为25Ω) |
C.滑动变阻器R3(0~1750Ω,0.1A) | F.定值电阻R03(阻值为5Ω) |
(1)按照实验电路,用笔画线代替导线,在如图乙所示的方框中完成实物图连接______(部分导线已画出).
(2)连接好电路之后,实验小组进行了以下操作:
第一,先将滑动变阻器的滑片移到最右端,调节电阻箱的阻值为零;
第二,闭合开关S,将滑片缓慢左移,使灵敏电流表满偏;
第三,保持滑片不动(可认为a,b间电压不变),调节电阻箱R′的阻值使灵敏电流表的示数恰好为满刻度的![]() .若此时电阻箱的示数如图丙所示,则灵敏电流表内阻的测量值Rg为_____Ω.
.若此时电阻箱的示数如图丙所示,则灵敏电流表内阻的测量值Rg为_____Ω.
(3)为较好地完成实验,尽量减小实验误差,实验中应选择的滑动变阻器和定值电阻分别为_____和_____(填表格中器材前的字母).
(4)要临时把该灵敏电流表改装成3.0V量程的电压表使用,则应将其与电阻箱_____(填“串联”或“并联”),并把电阻箱的电阻值调为_____Ω.
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】粗糙绝缘水平面上垂直穿过两根长直导线,俯视图如图所示,两根导线中通有相同的电流,电流方向垂直纸面向里。水平面上一带电滑块(电性未知)以某一初速v沿两导线连线的中垂线入射,运动过程中滑块始终未脱离水平面。下列说法正确的是 ( )
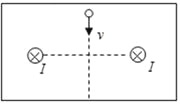
A. 滑块可能做加速直线运动
B. 滑块可能做匀速直线运动
C. 滑块可能做曲线运动
D. 滑块一定做减速运动
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】无人驾驶目前还有较多的技术障碍难以克服,其中汽车车载系统严重依赖无线通信传输速度是主要的技术障碍。最近世界通信巨头华为公司提出基于5G通信技术的解决方案,该5G通信技术的超低时延的优势将提升车联网数据采集的及时性,保障实时信息互通,消除无人驾驶安全风险。简化的工作模式是无人驾驶车载电脑发现问题,通过5G信号将问题传输给云端中央服务器,服务器将处理方案回传给车载电脑,然后车载电脑采取加速或减速等操作。在某次实验室测试中汽车以10m/s的速度匀速前进,车载传感器检测到正前方22m处有静止障碍物,车载电脑通过5G信号通知云端,随后车载系统获得指令立即采取制动措施(5G信号下,系统信号传输延迟忽略不计),使之做加速度大小为1m/s2的匀减速直线运动,并向车上成员发出警告,2s之后系统采取紧急制动,使汽车做匀减速直线运动,最终该汽车恰好没有与障碍物发生碰撞。,已知![]() 求:
求:
(1)驾驶员采取紧急制动之前,汽车行进距离的大小;
(2)假设驾驶员的质量为70kg,求紧急制动时座位对驾驶员的作用力大小;
(3)现有4G信号系统平均延迟时间为0.4s,在4G通信情况下,在22m距离内系统直接匀减速的加速度至少要多大才能避免相撞(保留2为有效数字)。
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】氦原子被电离出一个核外电子,形成类氢结构的氦离子。已知基态的氦离子能量为![]() ,氦离子的能级示意图如图所示。在具有下列能量的粒子中,能被基态氦离子吸收而发生跃迁的是( )
,氦离子的能级示意图如图所示。在具有下列能量的粒子中,能被基态氦离子吸收而发生跃迁的是( )
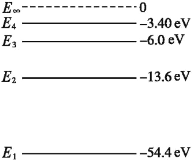
A. 54.4 eV(光子) B. 50.4 eV(光子)
C. 48.4 eV(电子) D. 42.8 eV(光子)
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示倾角θ=37°的光滑斜面AB与光滑半圆弧BC在B点相切,圆弧BC的圆心为O,半径R=0.4m整个空间存在方向水平向右匀强电场,电场强度E=3.0×103N/C.一个质量为m1=1kg,带电量q=+3×10-3C的滑块P由A端从静止开始沿绝缘的斜面向上运动,另一不带电质量为m2=0.2kg的滑块Q最初固定于B点,斜面AB长度l=15m.当滑块P运动到B点前一瞬间,将滑块Q由静止释放,两者碰撞后粘在一起运动,两滑块均可视为质点,碰撞时间极短,碰撞过程中总电量保持不变,g取10m/s2(sin37°=0.6,cos37°=0.8)。
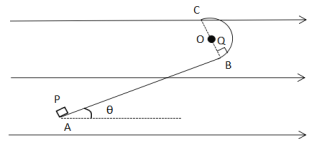
(1)求滑块P运动到B点与滑块Q碰撞前的速度;
(2)滑块P、Q粘在一起后,运动到C点时的速度;
(3)滑块离开C点后第一次落回斜面AB的落点与B点间的距离。
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
