 ,
, =0.2
=0.2
 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案科目:高中物理 来源: 题型:

查看答案和解析>>
科目:高中物理 来源: 题型:

查看答案和解析>>
科目:高中物理 来源: 题型:阅读理解
查看答案和解析>>
科目:高中物理 来源: 题型:
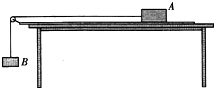 为了测定木块A与木板之间的动摩擦因数,某实验小组设计了如图所示的实验:将木板放在水平桌面上,木块A通过木板上的定滑轮用细线系一小物块B,开始用手拿着物块B使其静止且细线被张紧,松手后A、B一起运动,当B到达地面后停止运动,而木块A继续在木板上运动一段距离后停止运动.本实验除了用天平测出木块A的质量m1和物块B的质量m2外,还需要测量的物理量是
为了测定木块A与木板之间的动摩擦因数,某实验小组设计了如图所示的实验:将木板放在水平桌面上,木块A通过木板上的定滑轮用细线系一小物块B,开始用手拿着物块B使其静止且细线被张紧,松手后A、B一起运动,当B到达地面后停止运动,而木块A继续在木板上运动一段距离后停止运动.本实验除了用天平测出木块A的质量m1和物块B的质量m2外,还需要测量的物理量是查看答案和解析>>
科目:高中物理 来源: 题型:
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com