题目列表(包括答案和解析)

 某同学设计了一个测定激光的波长的实验装置如图一所示,激光器发出一束直径很小的红色激光进入一个一端装有双缝、另一端装有感光片的遮光筒,感光片的位置上出现一排等距的亮线.
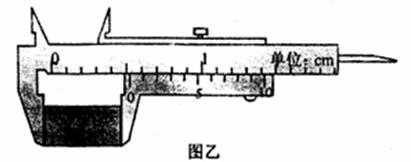
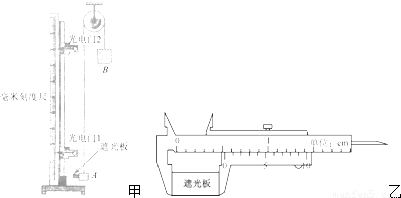
某同学设计了一个测定激光的波长的实验装置如图一所示,激光器发出一束直径很小的红色激光进入一个一端装有双缝、另一端装有感光片的遮光筒,感光片的位置上出现一排等距的亮线.如图甲所示,两物块A、B分别系在一条跨过定滑轮的软绳两端,利用光电门验证A、B所构成的系统机械能守恒。
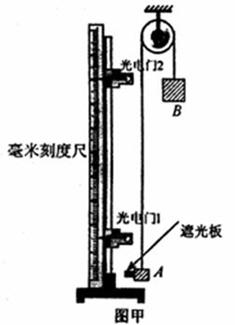
(1)用游标卡尺测出遮光板的宽度如图乙所示,遮光板的宽度d=_________mm。
(2)测出A、B两物块的质量分别为mA和mB,mA<mB,用刻度尺测出两光电门间的距离H,光电门1记录遮![]() 光条遮光时间为Δt1,光电门2记录了遮光条遮光时间为Δt2,重力加速度为g.则系统的动能增加量ΔEk=___________,重力势能的减小量ΔEp=___________,如果在误差允许的范围内ΔEk=ΔEp,则系统的机械能守恒。
光条遮光时间为Δt1,光电门2记录了遮光条遮光时间为Δt2,重力加速度为g.则系统的动能增加量ΔEk=___________,重力势能的减小量ΔEp=___________,如果在误差允许的范围内ΔEk=ΔEp,则系统的机械能守恒。
(3)实验中发现总有ΔEk<ΔEp,可能的原因是:________________________![]() _________________________
_________________________
_____。(至少写出两条)

| 1 |
| 2 |
| d |
| △t2 |
| d |
| △t1 |
| 1 |
| 2 |
| d |
| △t2 |
| d |
| △t1 |
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com