题目列表(包括答案和解析)
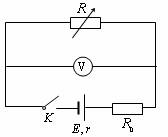
某研究性学习小组利用下左图所示电路测量某电池的电动势E和内电阻r。由于该电池的内电阻r较小,因此在电路中接入了一阻值为2.00Ω的定值电阻R0。
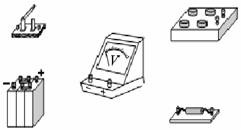
①按照下左图所示的电路图,将下右图所示的实物连接成实验电路。
②闭合开关K,调整电阻箱的阻值,读出电压表相应的示数,并计算出通过电阻箱的电流数值如下表所示:
| R/Ω | 40.00 | 20.00 | 12.00 | 8.00 | 6.00 | 5.00 |
| U/V | 1.89 | 1.78 | 1.66 | 1.57 | 1.43 | 1.35 |
| I/A | 0.047 | 0.138 | 0.196 | 0.238 |
为了比较准确地得出实验结论,请填全以上面表格所空的电流值,并在下图所示的坐标纸中作U―I图像。

③从图像得到 E =_______V,r = _______Ω.
某研究性学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示。在气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图像。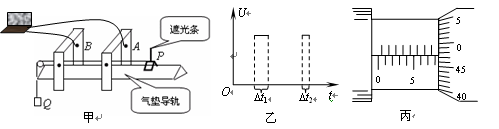
⑴实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的
Δt1 Δt2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平。
⑵用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d = mm。
⑶滑块P用细线跨过气垫导轨左端的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若Δt1、Δt2和d已知,要验证滑块和砝码组成的系统机械能是否守恒,还应测出 和 (写出物理量的名称及符号)。
⑷若上述物理量间满足关系式 ,则表明在上述过程中,滑块和砝码组成的系统机械能守恒。
某研究性学习小组利用气垫导轨进行验证机械能守恒定律实验,实验装置如图甲所示。将气垫导轨水平放置,在气垫导轨上相隔一定距离的两点处安装两个光电传感器A、B,滑块P上固定有遮光条,若光线被遮光条遮挡,光电传感器会输出高电平,两光电传感器再通过一个或门电路与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电平随时间变化的图象。
⑴实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,则图乙中的Δt1、Δt2间满足 关系,则说明气垫导轨已经水平。
⑵用游标卡尺测遮光条宽度d ,测量结果如图丙所示,则d = mm。 
图丙
(3)用细线通过气垫导轨左端的定滑轮将滑块P与质量为m的钩码Q相连,将滑块P由如图甲所示位置释放,通过计算机得到的图像如图乙所示,若Δt1、Δt2和d已知,要验证机械能是否守恒,还应测出 (写出物理量的名称及符号)。
(4)若上述物理量间满足关系式 ,则表明在滑块和砝码的运动过程中,系统的机械能守恒。
(10分)某研究性学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示。在气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象。

⑴实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的
Δt1? ? Δt2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平。
⑵用游标卡尺测遮光条宽度d,测量结果如图丙所示,则d =??? mm。
⑶滑块P用细线跨过气垫导轨左端的定滑轮与钩码Q相连,钩码Q的质量为m。将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若Δt1、Δt2和d已知,要验证滑块和砝码组成的系统机械能是否守恒,还应测出??? 和??? (写出物理量的名称及符号)。
⑷若上述物理量间满足关系式????? ,则表明在上述过程中,滑块和砝码组成的系统机械能守恒。
某研究性学习小组利用气垫导轨进行验证机械能守恒定律实验,实验装置如图甲所示。将气垫导轨水平放置,在气垫导轨上相隔一定距离的两点处安装两个光电传感器A、B,滑块P上固定有遮光条,若光线被遮光条遮挡,光电传感器便会输出高电压,并由计算机显示出来。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象。
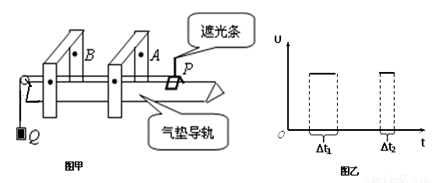
(1)实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,放手使其自由滑动,若图乙中的Δt1 Δt2(选填“>”、“=”或“<”),则说明气垫导轨已经水平。
(2)用游标卡尺测遮光条宽度d ,测量结果如图丙所示,则d = mm。
(3)用细线通过气垫导轨左端的定滑轮将滑块P与质量为m的钩码Q相连,将滑块P由如图甲所示位置释放,通过计算机得到的图像如图乙所示,若Δt1、Δt2和d已知,要验证机械能是否守恒,还应测出
和 (写出物理量的名称及符号)。
(4)若上述物理量间满足关系式 ,则表明在滑块和砝码的运动过程中,系统的机械能守恒。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com