题目列表(包括答案和解析)
如图a所示,装有位移传感器发射器的、质量为M的滑块A放在气垫导轨BC为位移传感器的接收器,它能将A到C的距离数据实时传送到计算机上,经计算机处理后在幕上显示滑块A的位移-时间(s-t)图像和速率-时间(v-t)图像。整个装置置于高度可调节的面上,斜面的长度为L、高度为h。(取重力加速度g=10m/s2,结果保留一位有效数字)
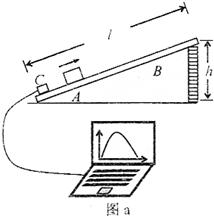

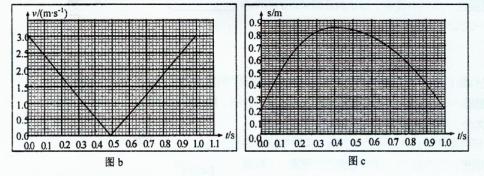
(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图像如图b所示。从图线可得滑块A下滑时的加速度a=____m/s2,从图线还可知摩擦力对滑块A运动的影响______。(填“明显,不可忽略”或“不明显,可忽略”)
(2)此装置还可用来验证牛顿第二定律。实验时,通过改变______,可以验证质量一定时,加速度与力成正比的关系;通过改变______,可以验证力一定时,加速度与质量成反比的关系(用L、h、M字母表示)
(3)将气垫导轨换成滑板,给滑块A一沿滑板向上的初速度,A的s-t图像如图c所示。图线不对称是由于______造成的,通过图像可求得滑板的倾角θ=_____(用反三角函数表示),滑块与滑板间的动摩擦因数μ=____。
如图a所示,装有位移传感器发射器的、质量为M的滑块A放在气垫导轨B上,C为位移传感器的接收器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示滑块A的位移-时间(s-t)图像和速率-时间(v-t)图像。整个装置置于高度可调节的斜面上,斜面的长度为L高度为h。(取重力加速度g=10m/s2,结果保留—位有效数字)
(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图像如图b所示。从图线可得滑块A下滑时的加速度a=
m/s2。
(2)此装置还可用来验证牛顿第二定律。实验时,通过改变h,可以验证质量—定时,加速度与力成正比的关系;通过改变 ,可以验证力一定时,加速度与质量成反比的关系。(用L、h、M字母表示)
(3)将气垫导轨换成滑板,给滑块A—沿滑板向上的初速度,A的s-t图像如图C所示。通过图像可求得滑板的倾角θ= (用反三角函数表示),滑块与滑板间的动摩擦因数μ= 。
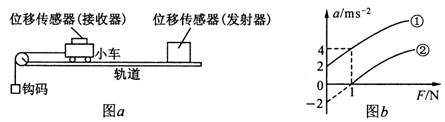
(10分)某实验小组设计了如图 a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力 F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条 a-F图线,如图 b所示.
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图 b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡)
B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量
C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度 a和力传感器读数F的关系图像
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验
(3)测得小车和位移传感器接收部分的总质量m= kg;滑块和轨道间的动摩擦因数μ= .
(10分)某实验小组设计了如图a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条a-F图线,如图b所示.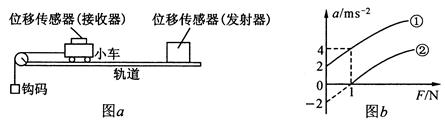
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
| A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡) |
| B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量 |
| C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度a和力传感器读数F的关系图像 |
| D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验 |
(10分)某实验小组设计了如图 a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力 F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条 a-F图线,如图 b所示.
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图 b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡)
B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量
C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度 a和力传感器读数F的关系图像
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验
(3)测得小车和位移传感器接收部分的总质量m= kg;滑块和轨道间的动摩擦因数μ= .
一、(20分)填空题
1.非 发光
2.
3.
4.R变小,Pm变小,α变大,B变大
5.4s 32m/s
二、(40分)选择题
I.单项选择题
6―10 DBBAB
II.多项选择题
11.BC 12.AB 13.AD 14.BD
三、(30分)实验题
15.(4分)D
16.(5分)BC
 17.(4分)导电纸的涂导电物质的一面朝下了;先负的绝对值逐渐减小后正的逐渐增大
17.(4分)导电纸的涂导电物质的一面朝下了;先负的绝对值逐渐减小后正的逐渐增大
18.(8分)(1)图略,(2分)
(2)甲(2分)
(3)0.15(2分)
(4)0.26(0.24 ? 0.28间都给分),(2分)
19.(9分)(1)6;不明显,可忽略(2分)
(2)h,M和h,且Mh不变(2分、2分)
(3)滑动摩擦力,(1分) (2分)
(2分)
四、(60分)计算题
20.(12分)解:灯L的电阻RL=6Ω正确,错在没有看出RPA和R2串联部分已被短路,(2分)

(2)当RPB=3Ω时,R并=2Ω,

21.(12分)(1)设左、右活塞的面积分别为A′和A,由于气体处于平衡状态,故两活塞对气体的压强相等,即: (2分)
(2分)
由此得: (1分)
(1分)
在两个活塞上各加一质量为m的物块后,右活塞降至气体缸底部,所有气体都在左气缸中。
在初态,气体的压强为 (x为左右活塞的高度)。由玻意耳―马略特定律得:
(x为左右活塞的高度)。由玻意耳―马略特定律得:

(2)当温度由T0上升至T时,气体的压强始终为 是温度达到T时左活塞的高度,由盖?吕萨克定律得:
是温度达到T时左活塞的高度,由盖?吕萨克定律得: (2分)
(2分)
活塞对气体做的功为: (3分)
(3分)
22.(10分)
 (1)图钉A拔掉前,轻线的拉力大小为
(1)图钉A拔掉前,轻线的拉力大小为 。 (2分)
。 (2分)
(2)小球沿切线方向飞出做匀速直线运动(2分)
直到线环被图钉B套住,小球速度为 (1分),
(1分),
匀速运动的位移 ,
,
(1分)(如图)
则时间 。(1分)
。(1分)
(3)v可分解为切向速度v1和法向速度v2,绳被拉紧后v2=0,小球以速度v1做匀速圆周运动,半径 。由
。由

23.(12分)
解:(1)设ab棒在导轨之间的长度为l,由欧姆定律得
 (3分)
(3分)
(2)设O点到ab棒距离为x,设ab棒的有效长度 (2分)
(2分)

(3)裸导线最终只能静止于O点,故其动能全部转化为焦耳热,即
 (2分)
(2分)
24.(14分)小球、小物块组成系统机械能守恒。
(1)小球下降到最低点时速度为0,设此时小物块的机械能为E1。
 (4分)
(4分)
(2)设小物块能下滑的最大距离为 ,此时小球、小物块速度为0,
,此时小球、小物块速度为0,
 (2分)
(2分)
而 (2分)
(2分)
代入解得 (1分)
(1分)
(3)设小物块下滑距离为L时的速度大小为v,此时小球的速度大小为v0,则
 (2分)
(2分)
 (2分)
(2分)
解得 (1分)
(1分)
本资料由《七彩教育网》www.7caiedu.cn 提供!
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com