ƒø¡–±Ì(∞¸¿®¥∞∏∫ÕΩ‚Œˆ)
µ—È–°◊È¿˚”√DISœµÕ≥( ˝◊÷ªØ–≈œ¢ µ—ÈœµÕ≥)£¨π€≤Ï≥¨÷ÿ∫Õ ß÷ÿœ÷œÛ£ÆÀ˚√«‘⁄—ß–£µÁÃðƒ⁄◊ˆ µ—È£¨‘⁄µÁÃðÃϪ®∞Â…œπÃ∂®“ª∏ˆ¿≠¡¶¥´∏–∆˜£¨≤‚¡øπ“π≥œÚœ¬£¨≤¢‘⁄π≥…œ–¸π““ª∏ˆ÷ÿŒ™10 Nµƒπ≥¬Î£¨‘⁄µÁÃð‘À∂Øπ˝≥Ã÷–£¨º∆À„ª˙œ‘ æ∆¡…œ≥ˆœ÷»Á”“ÕºÀ˘ æÕºœþ£¨∏˘æðÕºœþ∑÷Œˆø…÷™œ¬¡–Àµ∑®’˝»∑µƒ «(°°°°)

A£Æ¥” ±øÃt1µΩt2£¨π≥¬Î¥¶”⁄≥¨÷ÿ◊¥Ã¨£¨¥” ±øÃt3µΩt4£¨π≥¬Î¥¶”⁄ ß÷ÿ◊¥Ã¨
B£Æt1µΩt2 ±º‰ƒ⁄£¨µÁÃð“ª∂®‘⁄œÚœ¬‘À∂Ø£¨t3µΩt4 ±º‰ƒ⁄£¨µÁÃðø…ƒÐ’˝‘⁄œÚ…œ‘À∂Ø
C£Æt1µΩt4 ±º‰ƒ⁄£¨µÁÃðø…ƒÐœ»º”ÀŸœÚœ¬£¨Ω”◊≈‘»ÀŸœÚœ¬£¨‘ŸºıÀŸœÚœ¬
D£Æt1µΩt4 ±º‰ƒ⁄£¨µÁÃðø…ƒÐœ»º”ÀŸœÚ…œ£¨Ω”◊≈‘»ÀŸœÚ…œ£¨‘ŸºıÀŸœÚ…œ
µ—È–°◊È¿˚”√DISœµÕ≥( ˝◊÷ªØ–≈œ¢ µ—ÈœµÕ≥)£¨π€≤Ï≥¨÷ÿ∫Õ ß÷ÿœ÷œÛ£ÆÀ˚√«‘⁄—ß–£µÁÃðƒ⁄◊ˆ µ—È£¨‘⁄µÁÃðÃϪ®∞Â…œπÃ∂®“ª∏ˆ¿≠¡¶¥´∏–∆˜£¨≤‚¡øπ“π≥œÚœ¬£¨≤¢‘⁄π≥…œ–¸π““ª∏ˆ÷ÿŒ™10 Nµƒπ≥¬Î£¨‘⁄µÁÃð‘À∂Øπ˝≥Ã÷–£¨º∆À„ª˙œ‘ æ∆¡…œ≥ˆœ÷»Á”“ÕºÀ˘ æÕºœþ£¨∏˘æðÕºœþ∑÷Œˆø…÷™œ¬¡–Àµ∑®’˝»∑µƒ «(°°°°)
A£Æ¥” ±øÃt1µΩt2£¨π≥¬Î¥¶”⁄ ß÷ÿ◊¥Ã¨£¨¥” ±øÃt3µΩt4£¨π≥¬Î¥¶”⁄≥¨÷ÿ◊¥Ã¨
B£Æt1µΩt2 ±º‰ƒ⁄£¨µÁÃð“ª∂®‘⁄œÚœ¬‘À∂Ø£¨t3µΩt4 ±º‰ƒ⁄£¨µÁÃðø…ƒÐ’˝‘⁄œÚ…œ‘À∂Ø
C£Æt1µΩt4 ±º‰ƒ⁄£¨µÁÃðø…ƒÐœ»º”ÀŸœÚœ¬£¨Ω”◊≈‘»ÀŸœÚœ¬£¨‘ŸºıÀŸ

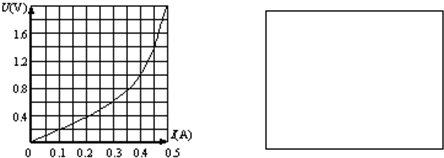
(12∑÷) Œ™¡À≤‚∂®µÁ‘¥µÁ∂Ø ∆Eµƒ¥Û–°°¢ƒ⁄µÁ◊Ër∫Õ∂®÷µµÁ◊ËR0µƒ◊Ë÷µ£¨ƒ≥Õ¨—ß¿˚”√DIS…˺∆¡À»Á◊ÛÕºÀ˘ 浃µÁ¬∑£Æ±’∫œµÁº¸S1£¨µ˜Ω⁄ª¨∂ر‰◊Ë∆˜µƒª¨∂Ø¥•Õ∑PœÚƒ≥“ª∑ΩœÚ“∆∂Ø ±£¨”√µÁ—π¥´∏–∆˜1°¢µÁ—π¥´∏–∆˜2∫ÕµÁ¡˜¥´∏–∆˜≤‚µ√ ˝æð£¨≤¢∏˘æð≤‚¡ø ˝æðº∆À„ª˙∑÷±√˪ʡÀ»Á”“ÕºÀ˘ 浃M°¢N¡ΩÃıU£≠I÷±œþ£Æ«Îªÿ¥œ¬¡–Œ £∫
(1)∏˘æð”“Õº÷–µƒM°¢N¡ΩÃı÷±œþø…÷™( )
A£Æ÷±œþM «∏˘æðµÁ—π¥´∏–∆˜1∫ÕµÁ¡˜¥´∏–∆˜µƒ ˝æðª≠µ√µƒ
B£Æ÷±œþM «∏˘æðµÁ—π¥´∏–∆˜2∫ÕµÁ¡˜¥´∏–∆˜µƒ ˝æðª≠µ√µƒ
C£Æ÷±œþN «∏˘æðµÁ—π¥´∏–∆˜1∫ÕµÁ¡˜¥´∏–∆˜µƒ ˝æðª≠µ√µƒ
D£Æ÷±œþN «∏˘æðµÁ—π¥´∏–∆˜2∫ÕµÁ¡˜¥´∏–∆˜µƒ ˝æðª≠µ√µƒ
(2)ÕºœÛ÷–¡Ω÷±œþΩªµ„¥¶µÁ¬∑÷–µƒπ§◊˜◊¥Ã¨ «( )
A£Æª¨∂ر‰◊Ë∆˜µƒª¨∂ØÕ∑Pª¨µΩ¡À◊Ó◊Û∂À B£ÆµÁ‘¥µƒ ‰≥ˆπ¶¬ ◊Ó¥Û
C£Æ∂®÷µµÁ◊ËR0…œœ˚∫ƒµƒπ¶¬ Œ™0.5 W D£ÆµÁ‘¥µƒ–߬ ¥ÔµΩ◊Ó¥Û÷µ
(3)∏˘æð”“Õºø…“‘«Ûµ√µÁ‘¥ƒ⁄µÁ◊Ër£Ω________ ¶∏.

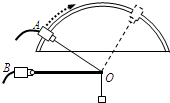 »ÁÕºÀ˘ 棨ƒ≥–°◊ÈÕ¨—ß¿˚”√DIS µ—È◊∞÷√—–æø÷ߺЅœ¡¶µƒ∑÷Ω‚A°¢BŒ™¡Ω∏ˆœýÕ¨µƒÀ´œÚ¡¶¥´∏–∆˜£¨∏√–Õ∫≈¥´∏–∆˜‘⁄ ÐµΩ¿≠¡¶ ±∂¡ ˝Œ™’˝£¨ ÐµΩ—π¡¶ ±∂¡ ˝Œ™∏∫£ÆA¡¨Ω”÷ ¡ø≤ªº∆µƒœ∏…˛£¨ø…—ÿπÃ∂®µƒ∞Â◊ˆ‘≤ª°–Œ“∆∂Ø£ÆBπÃ∂®≤ª∂Ø£¨Õ®π˝π‚ª¨Ω¬¡¥¡¨Ω”≥§0.3mµƒ∏À£ÆΩ´œ∏…˛¡¨Ω”‘⁄∏À”“∂ÀOµ„ππ≥…÷ߺУƱ£≥÷∏À‘⁄ÀÆ∆Ω∑ΩœÚ£¨∞¥»Áœ¬≤Ω÷Ë≤Ÿ◊˜£∫
»ÁÕºÀ˘ 棨ƒ≥–°◊ÈÕ¨—ß¿˚”√DIS µ—È◊∞÷√—–æø÷ߺЅœ¡¶µƒ∑÷Ω‚A°¢BŒ™¡Ω∏ˆœýÕ¨µƒÀ´œÚ¡¶¥´∏–∆˜£¨∏√–Õ∫≈¥´∏–∆˜‘⁄ ÐµΩ¿≠¡¶ ±∂¡ ˝Œ™’˝£¨ ÐµΩ—π¡¶ ±∂¡ ˝Œ™∏∫£ÆA¡¨Ω”÷ ¡ø≤ªº∆µƒœ∏…˛£¨ø…—ÿπÃ∂®µƒ∞Â◊ˆ‘≤ª°–Œ“∆∂Ø£ÆBπÃ∂®≤ª∂Ø£¨Õ®π˝π‚ª¨Ω¬¡¥¡¨Ω”≥§0.3mµƒ∏À£ÆΩ´œ∏…˛¡¨Ω”‘⁄∏À”“∂ÀOµ„ππ≥…÷ߺУƱ£≥÷∏À‘⁄ÀÆ∆Ω∑ΩœÚ£¨∞¥»Áœ¬≤Ω÷Ë≤Ÿ◊˜£∫| A£Æ“ÚŒ™ ¬œ»Õ¸º«µ˜¡„ | B£Æ∫Œ ±µ˜¡„∂‘ µ—ÈΩ·π˚√ª”–”∞œÏ |
| C£ÆŒ™¡Àœ˚≥˝∫·∏À◊‘…Ì÷ÿ¡¶∂‘Ω·π˚µƒ”∞œÏ | D£Æø…“‘ÕÍ»´œ˚≥˝ µ—ȵƒŒÛ≤Ó |
| F1 | 1.001 | 0.580 | °≠ | 1.002 | °≠ |
| F2 | -0.868 | -0.291 | °≠ | 0.865 | °≠ |
| ¶» | 30°„ | 60°„ | °≠ | 150°„ | °≠ |
| F1 | 1.103 | °≠ | |
| F2 | °≠ | °≠ | °≠ |
| ¶» | 30°„ | 60°„ | °≠ |
 £®1£©£®µ•—°Ã‚£©”√œ∏œþΩ´“ªøÈ≤£¡ß∆¨ÀÆ∆Ωµÿ–¸π“‘⁄µØª…≤‚¡¶º∆µƒœ¬∂À£¨≤¢ π≤£¡ß∆¨Ã˘‘⁄ÀÆ√Ê…œ£¨»ÁÕºÀ˘ 棨»ª∫Û”√ ÷ª∫¬˝Ã·∆µØª…≤‚¡¶º∆£¨‘⁄ π≤£≠P∆¨Õ—¿ÎÀÆ√ʵƒ“ªÀ≤º‰£¨πÿ”⁄µØª…≤‚¡¶º∆µƒ æ ˝œ¬¡–Àµ∑®÷–’˝»∑µƒ «
£®1£©£®µ•—°Ã‚£©”√œ∏œþΩ´“ªøÈ≤£¡ß∆¨ÀÆ∆Ωµÿ–¸π“‘⁄µØª…≤‚¡¶º∆µƒœ¬∂À£¨≤¢ π≤£¡ß∆¨Ã˘‘⁄ÀÆ√Ê…œ£¨»ÁÕºÀ˘ 棨»ª∫Û”√ ÷ª∫¬˝Ã·∆µØª…≤‚¡¶º∆£¨‘⁄ π≤£≠P∆¨Õ—¿ÎÀÆ√ʵƒ“ªÀ≤º‰£¨πÿ”⁄µØª…≤‚¡¶º∆µƒ æ ˝œ¬¡–Àµ∑®÷–’˝»∑µƒ «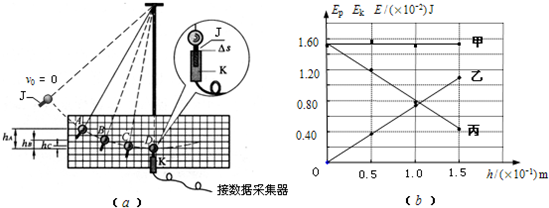
π˙º —ß–£”≈—° - ¡∑œ∞≤·¡–±Ì - ‘¡–±Ì
∫˛±± °ª•¡™Õ¯Œ•∑®∫Õ≤ª¡º–≈œ¢æŸ±®∆Ωî | Õ¯…œ”–∫¶–≈œ¢æŸ±®◊®«¯ | µÁ–≈’©∆≠柱®◊®«¯ | …Ê¿˙ ∑–ÈŒÞ÷˜“”–∫¶–≈œ¢æŸ±®◊®«¯ | …Ê∆Û«÷»®æŸ±®◊®«¯
Œ•∑®∫Õ≤ª¡º–≈œ¢æŸ±®µÁª∞£∫027-86699610 柱®” œ‰£∫58377363@163.com