ÌâÄ¿Áбí(°üÀ¨´ð°¸ºÍ½âÎö)
 £¨1£©ÀûÓÃͼÖÐËùʾµÄ×°ÖÿÉÒÔÑо¿×ÔÓÉÂäÌåÔ˶¯£®ÊµÑéÖÐÐèÒªµ÷ÕûºÃÒÇÆ÷£¬½Óͨ´òµã¼ÆʱÆ÷µÄµçÔ´£¬ËÉ¿ªÖ½´ø£¬Ê¹ÖØÎïÏÂÂ䣮´òµã¼ÆʱÆ÷»áÔÚÖ½´øÉÏ´ò³öһϵÁеÄСµã£®
£¨1£©ÀûÓÃͼÖÐËùʾµÄ×°ÖÿÉÒÔÑо¿×ÔÓÉÂäÌåÔ˶¯£®ÊµÑéÖÐÐèÒªµ÷ÕûºÃÒÇÆ÷£¬½Óͨ´òµã¼ÆʱÆ÷µÄµçÔ´£¬ËÉ¿ªÖ½´ø£¬Ê¹ÖØÎïÏÂÂ䣮´òµã¼ÆʱÆ÷»áÔÚÖ½´øÉÏ´ò³öһϵÁеÄСµã£®
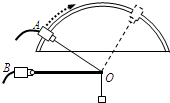 ÈçͼËùʾ£¬Ä³Ð¡×éͬѧÀûÓÃDISʵÑé×°ÖÃÑо¿Ö§¼ÜÉÏÁ¦µÄ·Ö½âA¡¢BΪÁ½¸öÏàͬµÄË«ÏòÁ¦´«¸ÐÆ÷£¬¸ÃÐͺŴ«¸ÐÆ÷ÔÚÊܵ½ÀÁ¦Ê±¶ÁÊýΪÕý£¬Êܵ½Ñ¹Á¦Ê±¶ÁÊýΪ¸º£®AÁ¬½ÓÖÊÁ¿²»¼ÆµÄϸÉþ£¬¿ÉÑع̶¨µÄ°å×öÔ²»¡ÐÎÒƶ¯£®B¹Ì¶¨²»¶¯£¬Í¨¹ý¹â»¬½ÂÁ´Á¬½Ó³¤0.3mµÄ¸Ë£®½«Ï¸ÉþÁ¬½ÓÔÚ¸ËÓÒ¶ËOµã¹¹³ÉÖ§¼Ü£®±£³Ö¸ËÔÚˮƽ·½Ïò£¬°´Èçϲ½Öè²Ù×÷£º
ÈçͼËùʾ£¬Ä³Ð¡×éͬѧÀûÓÃDISʵÑé×°ÖÃÑо¿Ö§¼ÜÉÏÁ¦µÄ·Ö½âA¡¢BΪÁ½¸öÏàͬµÄË«ÏòÁ¦´«¸ÐÆ÷£¬¸ÃÐͺŴ«¸ÐÆ÷ÔÚÊܵ½ÀÁ¦Ê±¶ÁÊýΪÕý£¬Êܵ½Ñ¹Á¦Ê±¶ÁÊýΪ¸º£®AÁ¬½ÓÖÊÁ¿²»¼ÆµÄϸÉþ£¬¿ÉÑع̶¨µÄ°å×öÔ²»¡ÐÎÒƶ¯£®B¹Ì¶¨²»¶¯£¬Í¨¹ý¹â»¬½ÂÁ´Á¬½Ó³¤0.3mµÄ¸Ë£®½«Ï¸ÉþÁ¬½ÓÔÚ¸ËÓÒ¶ËOµã¹¹³ÉÖ§¼Ü£®±£³Ö¸ËÔÚˮƽ·½Ïò£¬°´Èçϲ½Öè²Ù×÷£º| A£®ÒòΪÊÂÏÈÍü¼Çµ÷Áã | B£®ºÎʱµ÷Áã¶ÔʵÑé½á¹ûûÓÐÓ°Ïì |
| C£®ÎªÁËÏû³ýºá¸Ë×ÔÉíÖØÁ¦¶Ô½á¹ûµÄÓ°Ïì | D£®¿ÉÒÔÍêÈ«Ïû³ýʵÑéµÄÎó²î |
| F1 | 1.001 | 0.580 | ¡ | 1.002 | ¡ |
| F2 | -0.868 | -0.291 | ¡ | 0.865 | ¡ |
| ¦È | 30¡ã | 60¡ã | ¡ | 150¡ã | ¡ |
| F1 | 1.103 | ¡ | |
| F2 | ¡ | ¡ | ¡ |
| ¦È | 30¡ã | 60¡ã | ¡ |

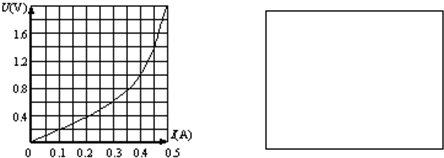
 £¨1£©£¨µ¥Ñ¡Ì⣩ÓÃϸÏß½«Ò»¿é²£Á§Æ¬Ë®Æ½µØÐü¹ÒÔÚµ¯»É²âÁ¦¼ÆµÄ϶ˣ¬²¢Ê¹²£Á§Æ¬ÌùÔÚË®ÃæÉÏ£¬ÈçͼËùʾ£¬È»ºóÓÃÊÖ»ºÂýÌáÆ𵯻ɲâÁ¦¼Æ£¬ÔÚʹ²£PƬÍÑÀëË®ÃæµÄһ˲¼ä£¬¹ØÓÚµ¯»É²âÁ¦¼ÆµÄʾÊýÏÂÁÐ˵·¨ÖÐÕýÈ·µÄÊÇ
£¨1£©£¨µ¥Ñ¡Ì⣩ÓÃϸÏß½«Ò»¿é²£Á§Æ¬Ë®Æ½µØÐü¹ÒÔÚµ¯»É²âÁ¦¼ÆµÄ϶ˣ¬²¢Ê¹²£Á§Æ¬ÌùÔÚË®ÃæÉÏ£¬ÈçͼËùʾ£¬È»ºóÓÃÊÖ»ºÂýÌáÆ𵯻ɲâÁ¦¼Æ£¬ÔÚʹ²£PƬÍÑÀëË®ÃæµÄһ˲¼ä£¬¹ØÓÚµ¯»É²âÁ¦¼ÆµÄʾÊýÏÂÁÐ˵·¨ÖÐÕýÈ·µÄÊÇ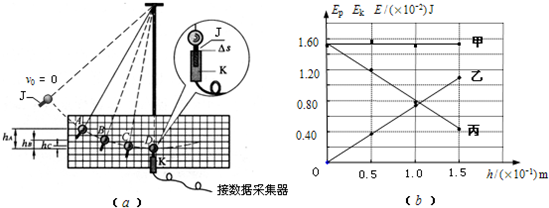
¹ú¼ÊѧУÓÅÑ¡ - Á·Ï°²áÁбí - ÊÔÌâÁбí
ºþ±±Ê¡»¥ÁªÍøÎ¥·¨ºÍ²»Á¼ÐÅÏ¢¾Ù±¨Æ½Ì¨ | ÍøÉÏÓк¦ÐÅÏ¢¾Ù±¨×¨Çø | µçÐÅթƾٱ¨×¨Çø | ÉæÀúÊ·ÐéÎÞÖ÷ÒåÓк¦ÐÅÏ¢¾Ù±¨×¨Çø | ÉæÆóÇÖȨ¾Ù±¨×¨Çø
Î¥·¨ºÍ²»Á¼ÐÅÏ¢¾Ù±¨µç»°£º027-86699610 ¾Ù±¨ÓÊÏ䣺58377363@163.com