| ЖрбЁ |
| ШчЭМЫљЪОЕФзАжУЃЌOЮЊИмИЫЕФжЇЕуЃЌдкИмИЫЩЯЙвгажиЮЊ60 NЕФжиЮяBЃЌИмИЫЕФзѓЖЫЭЈЙ§ЯИЩўЃЈЩўЕФжаМфДЎвЛИіЕЏЛЩВтСІМЦЃЉПчЙ§ЖЈЛЌТжаќЙвзХжиЮяAДІгкОВжЙзДЬЌЃЌДЫЪБЕЏЛЩВтСІМЦЕФЪОЪ§ЮЊ40 NЃЌИмИЫдкЫЎЦНЮЛжУЦНКтЃЎБЃГжMЕуЮЛжУВЛЖЏЃЌЯђШнЦїC жаЛКТ§зЂЫЎжСAЭъШЋНўУЛдкЫЎжаЃЌВтСІМЦЪОЪ§БфЮЊ20 NЭаЦ№ШнЦїCЃЌЪЙAНгДЅШнЦїЕФЕзВПЃЌЕЏЛЩВтСІМЦЕФЪОЪ§ж№НЅМѕЮЊ10 NЃЌЭЌЪБвЦЖЏЮяЬхBЕФаќЙвЕуЃЌЪЙИмИЫШддкЫЎЦНЮЛжУЦНКтЁЃШєвбжЊШнЦїЕФЕзУцЛ§ЮЊ200cm2ЃЌИмИЫЁЂЕЏЛЩВтСІМЦЁЂЯИЩўКЭЛЌТжЕФжЪСПвдМАвЛЧаФІВСОљПЩКіТдВЛМЦЃЌЫЎЕФУмЖШІб=1.0ЁС103 kg/m3ЃЌШЁg=10 N/kgдђИљОнвдЩЯЪ§ОнПЩжЊ |
|
AЃЎЮяЬхAЕФЬхЛ§ЮЊ2ЁС103 cm3 BЃЎЮяЬхAЕФУмЖШЮЊ2ЁС103kgЃЏm3 CЃЎЮяЬхBЕФаќЙвЕугІЯђзѓвЦЖЏЕФОрРыЮЊИмИЫГЄЖШЕФ  DЃЎШєНЋЮяЬхAДгШнЦїжаШЁГіЃЌШЁГіЧАКѓШнЦїЕзВПЪмЫЎЕФбЙЧПЕФБфЛЏСПЮЊ100 Pa |
ПЦФПЃКГѕжаЮяРэ РДдДЃК ЬтаЭЃКдФЖСРэНт
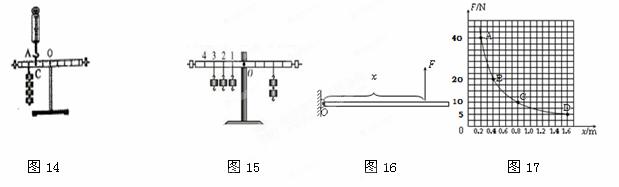
ШчЭМ13ЪОЃЌФГаЁзщбаОПЁАИмИЫЕФЦНКтЬѕМўЁБЃЌЦїВФЃКгаПЬЖШЕФИмИЫЁЂШєИЩИіЯрЭЌЕФЙГТыЁЂЕЏЛЩВтСІМЦЕШЃЌOЮЊИмИЫЕФжЇЕуЁЃ
 ЂйЪЕбщЧАЃЌгІЯШЕїНкИмИЫдк Ёј ЮЛжУЦНКтЁЃетбљзіЃЌГ§СЫПЩвдЯћГ§здЩэЕФжиСІгАЯьЃЌЛЙПЩвдЗНБуЕиВтСПЛђЖСГі Ёј ЁЃЕїНкЪБЃЌШчЗЂЯжИмИЫзѓЖЫЦЋИпЃЌгІШч
ЂйЪЕбщЧАЃЌгІЯШЕїНкИмИЫдк Ёј ЮЛжУЦНКтЁЃетбљзіЃЌГ§СЫПЩвдЯћГ§здЩэЕФжиСІгАЯьЃЌЛЙПЩвдЗНБуЕиВтСПЛђЖСГі Ёј ЁЃЕїНкЪБЃЌШчЗЂЯжИмИЫзѓЖЫЦЋИпЃЌгІШч![]() КЮВйзї: Ёј ЁЃ
КЮВйзї: Ёј ЁЃ
ЂкФГЪЕбщаЁзщМЧТМСНзщЪ§ОнШчЯТЃК
| ЪЕбщађКХ | ЖЏСІF1/N | ЖЏСІБлl1/cm | зшСІF2/N | зшСІБлl2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
ИљОнЗжЮіЃЌетзщЪ§ОнжаЃЌЪЕбщађКХЮЊ Ёј ЃЈбЁЬюЃКЁА1ЁБЛђЁА2ЁБЃЉЕФвЛзщПЯЖЈгаДэЮѓЁЃМьВщЗЂЯжЪЧВтСПЖЏСІБлЪБЖСДэСЫЃЌЖЏСІБлЕФЪЕМЪжЕБШМЧТМжЕ Ёј ЃЈбЁЬюЃКДѓЛђаЁЃЉЁЃ
ЂлШчЭМ14ЫљЪОЃЌЕЏЛЩВтСІМЦдкCДІгЩЪњжБЯђЩЯж№НЅЯђгвЧуаБРЖЏИмИЫЃЌШдЪЙИмИЫдкЫЎЦНЮЛжУБЃГжЦНКтЃЌдђЕЏЛЩВтСІМЦЕФЪОЪ§НЋ Ёј ЃЈбЁЬюЃКБфДѓЁЂБфаЁЛђБЃГжВЛБфЃЉЃЌЦфдвђЪЧ Ёј ЁЃЃЈ2ЗжЃЉ
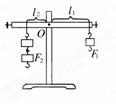
ЂмФГДЮЪЕбщжаЃЌШєВЩШЁШчЭМ15ЫљЪОЕФЗНЪНаќЙвЙГТыЃЌИмИЫвВФмдкЫЎЦНЮЛжУБЃГжЦНКт(ИмИЫЩЯУПИёЕШОр)ЃЌЕЋРЯЪІШДЭљЭљЬсабДѓМвВЛвЊВЩгУетжжЗНЪНЃЌетжївЊЪЧвдЯТФФжждвђ Ёј ЃЈбЁЬюзжФИЃЉЁЃ
AЃЎвЛИіШЫЮоЗЈЖРСЂВйзї BЃЎашвЊЪЙгУЬЋЖрЕФЙГТы![]()
CЃЎСІБлгыИмИЫВЛжиКЯ DЃЎСІКЭСІБлЪ§ФПЙ§Жр
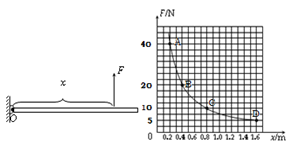
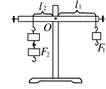
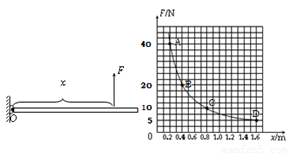
ЂнШчЭМ16ЫљЪОЃЌФГЪЕбщаЁзщбЁгУГЄ1.6mЁЂПЩШЦOЕудкЪњжБЦНУцФкздгЩзЊЖЏЧвДжЯИОљдШЕФвЛИљН№ЪєИЫЃЌНЋвЛИіЁАРСІЁЊЁЊОрРыДЋИаЦїЁБЪњжБзАжУдкИЫЩЯЃЌВЂЪЙИмИЫдкЫЎЦНЮЛжУЪМжеБЃГжЦНКтЁЃИУДЋИаЦїЯдЪОЦфРСІFгызїгУЕуЕНOЕуОрРыxЕФБфЛЏЙиЯЕШчЭМ17ЫљЪОЁЃгЩЭМПЩжЊН№ЪєИЫжи Ёј NЁЃ
ПЦФПЃКГѕжаЮяРэ РДдДЃК ЬтаЭЃК
 ЃЈ1ЃЉвдЯТМИжжзАжУжаЃЌЪєгкЗбСІИмИЫЕФЪЧ
ЃЈ1ЃЉвдЯТМИжжзАжУжаЃЌЪєгкЗбСІИмИЫЕФЪЧПЦФПЃКГѕжаЮяРэ РДдДЃК ЬтаЭЃКНтД№Ьт
 ЃЈ1ЃЉвдЯТМИжжзАжУжаЃЌЪєгкЗбСІИмИЫЕФЪЧ______ЃЛ
ЃЈ1ЃЉвдЯТМИжжзАжУжаЃЌЪєгкЗбСІИмИЫЕФЪЧ______ЃЛПЦФПЃКГѕжаЮяРэ РДдДЃКЁЖЕк13еТ СІКЭЛњаЕЁЗ2006ФъЕЅдЊВтЪдОэЃЈНтЮіАцЃЉ ЬтаЭЃКНтД№Ьт
ПЦФПЃКГѕжаЮяРэ РДдДЃК ЬтаЭЃКдФЖСРэНт
ШчЭМ13ЪОЃЌФГаЁзщбаОПЁАИмИЫЕФЦНКтЬѕМўЁБЃЌЦїВФЃКгаПЬЖШЕФИмИЫЁЂШєИЩИіЯрЭЌЕФЙГТыЁЂЕЏЛЩВтСІМЦЕШЃЌOЮЊИмИЫЕФжЇЕуЁЃ
ЂйЪЕбщЧАЃЌгІЯШЕїНкИмИЫдкЫЎЦНЮЛжУЦНКтЁЃетбљзіЃЌГ§СЫПЩвдЯћГ§здЩэЕФжиСІгАЯьЃЌЛЙПЩвдЗНБуЕиВтСПЛђЖСГіЁЁЁЁЁЁЁЁЁЁЁЁЁЁ ЁЃЕїНкЪБЃЌШчЗЂЯжИмИЫзѓЖЫЦЋИпЃЌгІШчКЮВйзї: ЁЁЁЁЁЁЁЁ ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ ЁЃ
ЂкФГЪЕбщаЁзщМЧТМСНзщЪ§ОнШчЯТЃК
ЪЕбщађКХ | ЖЏСІF1/N | ЖЏСІБлl1/cm | зшСІF2/N | зшСІБлl2/cm |
1 | 2 | 20 | 1 | 10 |
2 | 1 | 8 | 2 | 4 |
ИљОнЗжЮіЃЌетзщЪ§ОнжаЃЌЪЕбщађКХЮЊЁЁЁЁЁЁ ЃЈбЁЬюЃКЁА1ЁБЛђЁА2ЁБЃЉЕФвЛзщПЯЖЈгаДэЮѓЁЃМьВщЗЂЯжЪЧВтСПЖЏСІБлЪБЖСДэСЫЃЌЖЏСІБлЕФЪЕМЪжЕБШМЧТМжЕЁЁЁЁЁЁ ЃЈбЁЬюЃКДѓЛђаЁЃЉЁЃ
ЂлШчЭМ14ЫљЪОЃЌЕЏЛЩВтСІМЦдкCДІгЩЪњжБЯђЩЯж№НЅЯђгвЧуаБРЖЏИмИЫЃЌ![]() ШдЪЙИмИЫдкЫЎЦНЮЛжУБЃГжЦНКтЃЌдђЕЏЛЩВтСІМЦЕФЪОЪ§НЋЁЁЁЁЁЁЁЁ ЃЈбЁЬюЃКБфДѓЁЂБфаЁЛђБЃГжВЛБфЃЉЃЌЦфдвђЪЧЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ ЁЃ
ШдЪЙИмИЫдкЫЎЦНЮЛжУБЃГжЦНКтЃЌдђЕЏЛЩВтСІМЦЕФЪОЪ§НЋЁЁЁЁЁЁЁЁ ЃЈбЁЬюЃКБфДѓЁЂБфаЁЛђБЃГжВЛБфЃЉЃЌЦфдвђЪЧЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ ЁЃ
ЂмФГДЮЪЕбщжаЃЌШєВЩШЁШчЭМ15ЫљЪОЕФЗНЪНаќЙвЙГТыЃЌИмИЫвВФмдкЫЎЦНЮЛжУБЃГжЦНКт(ИмИЫЩЯУПИёЕШОр)ЃЌЕЋРЯЪІШДЭљЭљЬсабДѓМвВЛвЊВЩгУетжжЗНЪНЃЌетжївЊЪЧвдЯТФФжждвђЁЁЁЁ ![]() ЃЈбЁЬюзжФИЃЉЁЃ
ЃЈбЁЬюзжФИЃЉЁЃ
AЃЎвЛИіШЫЮоЗЈЖРСЂВйзїЁЁЁЁ BЃЎашвЊЪЙгУЬЋЖрЕФЙГТы
CЃЎСІБлгыИмИЫВЛжиКЯЁЁЁЁЁЁ DЃЎСІКЭСІБлЪ§ФПЙ§Жр
ЂнШчЭМ16ЫљЪОЃЌФГЪЕбщаЁзщбЁгУГЄ1.6mЁЂПЩШЦOЕудкЪњжБЦНУцФкздгЩзЊЖЏЧвДжЯИОљдШЕФвЛИљН№ЪєИЫЃЌНЋвЛИіЁАРСІЁЊЁЊОрРыДЋИаЦїЁБЪњжБзАжУдкИЫЩЯЃЌВЂЪЙИмИЫдкЫЎЦНЮЛжУЪМжеБЃГжЦНКтЁЃИУДЋИаЦїЯдЪОЦфРСІFгызїгУЕуЕНOЕуОрРыxЕФБфЛЏЙиЯЕШчЭМ17ЫљЪОЁЃгЩЭМПЩжЊН№ЪєИЫжиЁЁЁЁЁЁЁЁЁЁ NЁЃ
ПЦФПЃКГѕжаЮяРэ РДдДЃК2013НьНЫеЪЁФЯОЉбЇДѓНЬг§зЈаобЇаЃОХФъМЖ9дТдТВтЮяРэЪдОэЃЈДјНтЮіЃЉ ЬтаЭЃКЪЕбщЬт
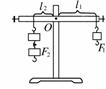
ШчЭМЪОЃЌФГаЁзщбаОПЁАИмИЫЕФЦНКтЬѕМўЁБЃЌЦїВФЃКгаПЬЖШЕФИмИЫЁЂШєИЩИіЯрЭЌЕФЙГТыЁЂЕЏЛЩВтСІМЦЕШЃЌOЮЊИмИЫЕФжЇЕуЁЃ
ЂйЪЕбщЧАЃЌгІЯШЕїНкИмИЫдк ЮЛжУЦНКтЁЃетбљзіЃЌГ§СЫПЩвдЯћГ§здЩэЕФжиСІгАЯьЃЌЛЙПЩвдЗНБуЕиВтСПЛђЖСГі ЁЃЕїНкЪБЃЌШчЗЂЯжИмИЫзѓЖЫЦЋИпЃЌгІШчКЮВйзї: ЁЃ
ЂкФГЪЕбщаЁзщМЧТМСНзщЪ§ОнШчЯТЃК
| ЪЕбщађКХ | ЖЏСІF1/N | ЖЏСІБлl1/cm | зшСІF2/N | зшСІБлl2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |


ПЦФПЃКГѕжаЮяРэ РДдДЃК2012-2013бЇФъНЫеЪЁОХФъМЖ9дТдТВтЮяРэЪдОэЃЈНтЮіАцЃЉ ЬтаЭЃКЪЕбщЬт
ШчЭМЪОЃЌФГаЁзщбаОПЁАИмИЫЕФЦНКтЬѕМўЁБЃЌЦїВФЃКгаПЬЖШЕФИмИЫЁЂШєИЩИіЯрЭЌЕФЙГТыЁЂЕЏЛЩВтСІМЦЕШЃЌOЮЊИмИЫЕФжЇЕуЁЃ
ЂйЪЕбщЧАЃЌгІЯШЕїНкИмИЫдк ЮЛжУЦНКтЁЃетбљзіЃЌГ§СЫПЩвдЯћГ§здЩэЕФжиСІгАЯьЃЌЛЙПЩвдЗНБуЕиВтСПЛђЖСГі ЁЃЕїНкЪБЃЌШчЗЂЯжИмИЫзѓЖЫЦЋИпЃЌгІШчКЮВйзї: ЁЃ
ЂкФГЪЕбщаЁзщМЧТМСНзщЪ§ОнШчЯТЃК
|
ЪЕбщађКХ |
ЖЏСІF1/N |
ЖЏСІБлl1/cm |
зшСІF2/N |
зшСІБлl2/cm |
|
1 |
2 |
20 |
1 |
10 |
|
2 |
1 |
8 |
2 |
4 |
ИљОнЗжЮіЃЌетзщЪ§ОнжаЃЌЪЕбщађКХЮЊ ЃЈбЁЬюЃКЁА1ЁБЛђЁА2ЁБЃЉЕФвЛзщПЯЖЈгаДэЮѓЁЃМьВщЗЂЯжЪЧВтСПЖЏСІБлЪБЖСДэСЫЃЌЖЏСІБлЕФЪЕМЪжЕБШМЧТМжЕ ЃЈбЁЬюЃКДѓЛђаЁЃЉЁЃ
ЂлШчЭМЫљЪОЃЌЕЏЛЩВтСІМЦдкCДІгЩЪњжБЯђЩЯж№НЅЯђгвЧуаБРЖЏИмИЫЃЌШдЪЙИмИЫдкЫЎЦНЮЛжУБЃГжЦНКтЃЌдђЕЏЛЩВтСІМЦЕФЪОЪ§НЋ ЃЈбЁЬюЃКБфДѓЁЂБфаЁЛђБЃГжВЛБфЃЉЃЌЦфдвђЪЧ ЁЃЃЈ2ЗжЃЉ

ЂмФГДЮЪЕбщжаЃЌШєВЩШЁШчЭМЫљЪОЕФЗНЪНаќЙвЙГТыЃЌИмИЫвВФмдкЫЎЦНЮЛжУБЃГжЦНКт(ИмИЫЩЯУПИёЕШОр)ЃЌЕЋРЯЪІШДЭљЭљЬсабДѓМвВЛвЊВЩгУетжжЗНЪНЃЌетжївЊЪЧвдЯТФФжждвђ ЃЈбЁЬюзжФИЃЉЁЃ

AЃЎвЛИіШЫЮоЗЈЖРСЂВйзї BЃЎашвЊЪЙгУЬЋЖрЕФЙГТы
CЃЎСІБлгыИмИЫВЛжиКЯ DЃЎСІКЭСІБлЪ§ФПЙ§Жр
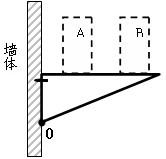
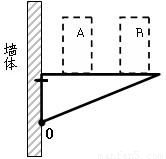
ЂнШчЭМЫљЪОЃЌФГЪЕбщаЁзщбЁгУГЄ1.6mЁЂПЩШЦOЕудкЪњжБЦНУцФкздгЩзЊЖЏЧвДжЯИОљдШЕФвЛИљН№ЪєИЫЃЌНЋвЛИіЁАРСІЁЊЁЊОрРыДЋИаЦїЁБЪњжБзАжУдкИЫЩЯЃЌВЂЪЙИмИЫдкЫЎЦНЮЛжУЪМжеБЃГжЦНКтЁЃИУДЋИаЦїЯдЪОЦфРСІFгызїгУЕуЕНOЕуОрРыxЕФБфЛЏЙиЯЕШчЭМЫљЪОЁЃгЩЭМПЩжЊН№ЪєИЫжи NЁЃ
ЙњМЪбЇаЃгХбЁ - СЗЯАВсСаБэ - ЪдЬтСаБэ
КўББЪЁЛЅСЊЭјЮЅЗЈКЭВЛСМаХЯЂОйБЈЦНЬЈ | ЭјЩЯгаКІаХЯЂОйБЈзЈЧј | ЕчаХеЉЦОйБЈзЈЧј | ЩцРњЪЗащЮожївхгаКІаХЯЂОйБЈзЈЧј | ЩцЦѓЧжШЈОйБЈзЈЧј
ЮЅЗЈКЭВЛСМаХЯЂОйБЈЕчЛАЃК027-86699610 ОйБЈгЪЯфЃК58377363@163.com
