下面哪一对力是平衡力( )
|
科目:初中物理 来源:《第10章 液体的压强》2011年单元测试卷(2)(解析版) 题型:选择题
科目:初中物理 来源:不详 题型:单选题
| A.悬浮在液体中的物体受到的浮力和重力 |
| B.物体在水中加速下沉过程中受到的浮力和重力 |
| C.物体沉在水底,底部与容器底有部分接触,这时受到容器的支持力和重力 |
| D.物体沉在水底,底部与容器底有部分接触,这时受到的浮力和重力 |
科目:初中物理 来源: 题型:
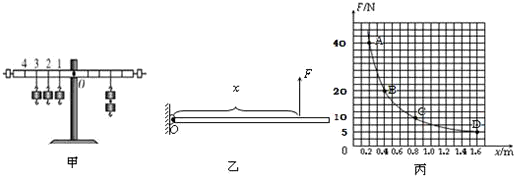
| 实验 序号 |
斜面的倾斜 程度 |
物块的重力G/N | 斜面高度 h/m |
沿斜面的拉力F/N | 斜面长 S/m |
机械效率 |
| 1 | 较缓 | 10 | 0.2 | 5.5 | 1 | 36.4% |
| 2 | 较陡 | 10 | 0.4 | 7.0 | 1 | 57.1% |
| 3 | 最陡 | 10 | 0.6 | 8.5 | 1 |
科目:初中物理 来源: 题型:解答题

科目:初中物理 来源: 题型:解答题
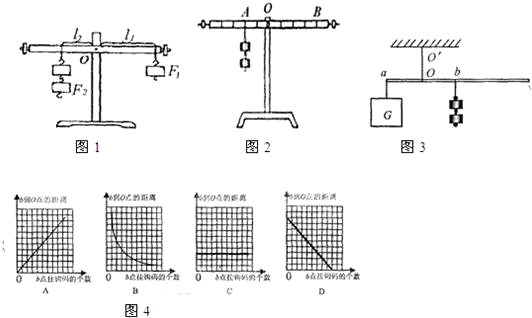
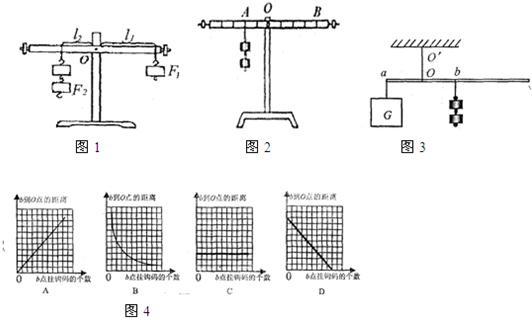
| 实验序号 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.3 | 1 | 0.4 |
| 2 | 1 | 0.4 | 2 | 0.2 |
科目:初中物理 来源:2009-2010学年江苏省苏州市昆山市九年级(上)期中物理试卷(解析版) 题型:解答题
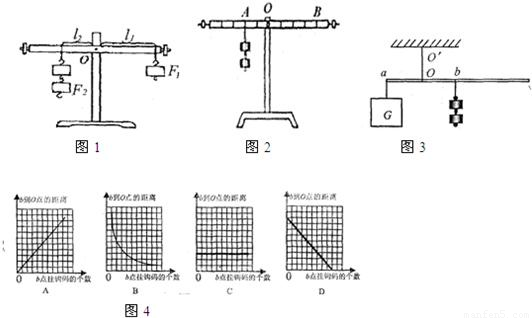
| 实验序号 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.3 | 1 | 0.4 |
| 2 | 1 | 0.4 | 2 | 0.2 |
科目:初中物理 来源: 题型:阅读理解
| 实验序号 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.3 | 1 | 0.4 |
| 2 | 1 | 0.4 | 2 | 0.2 |
科目:初中物理 来源:江苏模拟题 题型:探究题

科目:初中物理 来源: 题型:阅读理解

湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com