【题目】很多国家发射地球同步卫星时,先将卫星发射至近地圆形轨道1运行,然后在Q点点火,使其沿椭圆轨道2运行,最后在P点再次点火,将卫星送入同步圆形轨道3运行,如图所示。已知轨道1、2相切于Q点,轨道2、3相切于P点.若只考虑地球对卫星的引力作用,则卫星分别在1、2、3轨道上正常运行时,下列说法正确的是( )

A.若卫星在1、2、3轨道上正常运行时的周期分别为T1、T2、T3,则有T1>T2>T3
B.卫星沿轨道2由Q点运动到P点时引力做负功
C.根据公式v=ωr可知,卫星在轨道3上的运行速度大于在轨道1上的运行速度
D.根据![]() 可知,卫星在轨道2上任意位置的速度都小于在轨道1上的运行速度
可知,卫星在轨道2上任意位置的速度都小于在轨道1上的运行速度
科目:高中物理 来源: 题型:
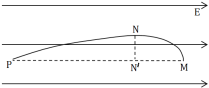
【题目】如图所示,在水平向右的匀强电场中,质量为![]() 的带电小球,以初速度v从
的带电小球,以初速度v从![]() 点竖直向上运动,通过
点竖直向上运动,通过![]() 点时,速度大小为2v,方向与电场方向相反,而后到达与
点时,速度大小为2v,方向与电场方向相反,而后到达与![]() 点在同一水平面上的P点,轨迹如图。其中N/是N点在MP直线上的投影点。以下关于小球的运动说法正确的是( )
点在同一水平面上的P点,轨迹如图。其中N/是N点在MP直线上的投影点。以下关于小球的运动说法正确的是( )
A.从M到N重力势能增加![]()
B.从M到N机械能增加2mv2
C.从M到P动能增加8mv2
D.重力与电场力大小之比为1:2
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】空间站中不能利用天平测量质量,为此某同学为空间站设计了如图(a)所示的实验装置,用来测量小球质量。图中弹簧固定在挡板上,光滑轨道B处装有光电门,可以测量出小球经过光电门的时间。该同学设计的主要实验步骤如下:

①用游标卡尺测量小球的直径d
②将弹簧左端固定在档板上
③小球与弹簧接触并压缩弹簧,记录压缩量x
④由静止释放小球,测量小球离开弹簧后经过光电门的时间t
⑤改变弹簧的压缩量,重复步骤③、④多次
⑥分析数据,得出小球的质量
已知弹簧弹性势能![]() ,
,![]() 为劲度系数,
为劲度系数,![]() 为形变量。该同学使用了一个已知劲度系数为
为形变量。该同学使用了一个已知劲度系数为![]() 的弹簧进行了上述实验,请回答下列问题
的弹簧进行了上述实验,请回答下列问题
(1)步骤①中游标卡尺示数情况如图(b)所示,小球的直径d=____cm;
(2)某一次步骤④中测得小球通过光电门的时间t为5.00 ms,则此次小球离开弹簧的速度v=_____m/s;
(3)根据实验步骤中测得的物理量,则可得小球的质量m=_____。(用实验步骤①、③、④中测得的物理量表示)
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图甲为新装的一批节能路灯,该路灯通过光控开关实现自动控制:电灯的亮度可自动随周围环境的亮度改变而改变.如图乙为其内部电路简化原理图,电源电动势为E,内阻为r,Rt为光敏电阻(光照强度增加时,其电阻值减小).现增加光照强度,则下列判断正确的是( )

A. 电源路端电压不变 B. B灯变暗,A灯变亮
C. R0两端电压变大 D. 电源总功率不变
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】某同学使用多用电表粗略测量一定值电阻的阻值:
(1)表内电池的 极与红表笔相连;
(2)先把选择开关旋到“×1k”挡位,测量时指针偏转如图所示。请你简述接下来的测量过程:


①断开待测电阻,将选择开关旋到 ;
②将两表笔短接, ;
③再接入待测电阻,重新读数;
④测量结束后,将选择开关旋到OFF档。
(3)表盘的示数如图,则电阻值是 Ω。
(4)接下来采用“伏安法”较准确地测量该电阻的阻值,所用实验器材如下图所示。其中电压表内阻约为5kΩ,电流表内阻约为5Ω 。图中部分电路已经连接好,请完成实验电路的连接。

查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示,平行板电容器的两个极板A、B分别接在电压为60V的恒压电源上,两极板间距为3cm,电容器带电荷量为6×10-8C,A极板接地.求:

(1)平行板电容器的电容;
(2)平行板电容器两板之间的电场强度;
(3)距B板2cm的M点处的电势.
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示,两个定值电阻R1、R2串联后接在电压U稳定于12V的直流电源上,有人把一个内阻不是远大于R1、R2的电压表接在R1两端,电压表的示数为8V.如果他把电压表改接在R2两端,则电压表的示数将( )

A. 大于4V小于8VB. 等于4V
C. 小于4VD. 等于或大于8V
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】如图所示,在水平圆盘上沿半径方向放置用细线相连的质量均为m的A、B两个物块(可视为质点)。A和B距轴心O的距离分别为rA=R,rB=2R,且A、B与转盘之间的最大静摩擦力都是fm,两物块A和B随着圆盘转动时,始终与圆盘保持相对静止。则在圆盘转动的角速度从0缓慢增大的过程中,下列说法正确的是( )

A.B所受合力一直等于A所受合力
B.A受到的摩擦力一直指向圆心
C.B受到的摩擦力先增大后不变
D.A、B两物块与圆盘保持相对静止的最大角速度ωm= ![]()
查看答案和解析>>
科目:高中物理 来源: 题型:
【题目】“新冠肺炎”的易传染性让每一个接触到病毒的人都有可能成为被感染的对象。如果在一些易传播的环境中启用机器人替代人工操作的话,就可以有效防控病毒传播,其中送餐服务就是机器人应用的一个领域,只要设置好路线、安放好餐盘,它就会稳稳地举着托盘,到达指定的位置送餐,如图所示。若某一隔离病区的配餐点和目标位置在相距x0=39.25m的直线通道上,机器人送餐时从静止开始启动,匀加速过程的加速度大小![]() ,速度达到
,速度达到![]() 后匀速运动,之后适时匀减速,恰好把食物平稳送到目标位置,整个送餐用时t0=40s。若载物平台呈水平状态,食物的总质量
后匀速运动,之后适时匀减速,恰好把食物平稳送到目标位置,整个送餐用时t0=40s。若载物平台呈水平状态,食物的总质量![]() ,食物与平台无相对滑动,g取10m/s2。试求:
,食物与平台无相对滑动,g取10m/s2。试求:
(1)机器人匀加速过程位移的大小x1;
(2)匀速运动持续的时间t;
(3) 匀减速过程中平台对食物的作用力F大小(结果可保留根号)。

查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
