分析 根据指令[4,60°]画出图形,如图,∠POx=60°,OP=4,作PQ⊥x轴于Q,利用∠POQ的正弦可计算出PQ=4sin60°=2$\sqrt{3}$,利用含30度的直角三角形三边的关系可得到OQ=$\frac{1}{2}$OP=2,所以P点坐标为(2,2$\sqrt{3}$).
解答 解:如图,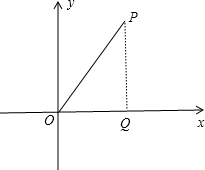 ∠POx=60°,OP=4,
∠POx=60°,OP=4,
作PQ⊥x轴于Q,
在Rt△POQ中,∵sin∠POQ=$\frac{PQ}{OP}$,
∴PQ=4sin60°=2$\sqrt{3}$,
而OQ=$\frac{1}{2}$OP=2,
∴P点坐标为(2,2$\sqrt{3}$),
即机器人应移动到点(2,2$\sqrt{3}$).
故答案为(2,2$\sqrt{3}$).
点评 本题考查了坐标与图形变化-旋转:图形或点旋转之后要结合旋转的角度和图形的特殊性质来求出旋转后的点的坐标.常见的是旋转特殊角度如:30°,45°,60°,90°,180°.解决本题的关键是根据新定义画出几何图形.

科目:初中数学 来源: 题型:填空题

查看答案和解析>>
科目:初中数学 来源: 题型:解答题
查看答案和解析>>
科目:初中数学 来源: 题型:解答题
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
 如图,已知△ABC≌△DBC,∠A=45°,∠ACD=76°,则∠DBC的度数为97°.
如图,已知△ABC≌△DBC,∠A=45°,∠ACD=76°,则∠DBC的度数为97°.