 某同学测一节干电池的电动势和内电阻,现提供器材如下:
某同学测一节干电池的电动势和内电阻,现提供器材如下:分析 (1)根据电池电动势选择电压表,根据电路最大电流选择电流表,为方便实验操作,在保证安全的前提下,要选择最大阻值较小的滑动变阻器.
(2)根据坐标系内描出的点作出电源的U-I图象;电源的U-I图象与纵轴的交点坐标值是电源的电动势,图象斜率的绝对值是电源的内阻.
解答 解:(1)干电池电动势约为1.5V,电压表应选:0~3V量程,由图象可知,电流小于1.0A,故电流表选择0~0.6A;
为方便实验操作,滑动变阻器应选择小电阻R1;
(2)根据坐标系内描出的点作出电源的U-I图象如图所示: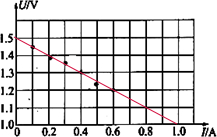
由图示电源U-I图象可知,电源电动势:E=1.5V,
电源的内阻:r=$\frac{△U}{△I}$=$\frac{1.5-1.0}{1.0}$=0.5Ω;
故答案为:(1)0~0.6A;0~3.0V;R1;(2)如图所示;1.5;0.5.
点评 本题考查了实验器材的选取、作实验电路图、求电动势与内阻,知道实验器材的选取原则、知道实验原理、掌握应用图象法处理实验数据的方法即可正确解题.在计算电源的内阻的时候,一定要注意纵坐标的数值是不是从0开始的.

科目:高中物理 来源: 题型:选择题
 在如图所示的电路中,理想变压器原、副线圈的匝数之比n1:n2=22:5,原线圈所接正弦交流电为μ=220$\sqrt{2}$sin100πt(V),电阻R1=R2=25Ω,D为理想二极管,则( )
在如图所示的电路中,理想变压器原、副线圈的匝数之比n1:n2=22:5,原线圈所接正弦交流电为μ=220$\sqrt{2}$sin100πt(V),电阻R1=R2=25Ω,D为理想二极管,则( )| A. | 电阻R1两端的电压为50V | B. | 二极管的反向耐压值应大于50V | ||
| C. | 通过副线圈的电流为3A | D. | 原线圈的输入功率为50$\sqrt{10}$W |
查看答案和解析>>
科目:高中物理 来源: 题型:解答题
查看答案和解析>>
科目:高中物理 来源: 题型:多选题
 2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中国科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进入世界前5的纪录.标志着我国在该领域的研究取得了重要进展.图1中是科大著名服务机器人“可佳”.如图2所示,现要执行一项任务.给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2),整个过程中机器人所用时间是2$\sqrt{2}$s,则( )
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中国科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进入世界前5的纪录.标志着我国在该领域的研究取得了重要进展.图1中是科大著名服务机器人“可佳”.如图2所示,现要执行一项任务.给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2),整个过程中机器人所用时间是2$\sqrt{2}$s,则( )| A. | 机器人的运动轨迹是一条直线 | |
| B. | 机器人有两次通过同一点 | |
| C. | 整个过程中机器人的位移大小为2$\sqrt{2}$m | |
| D. | 整个过程中机器人的平均速率为1m/s |
查看答案和解析>>
科目:高中物理 来源: 题型:多选题

| A. | 小球与斜槽之间有摩擦 | |
| B. | 安装斜槽时其末端不水平 | |
| C. | 建立坐标系时,以斜槽末端端口O位置为坐标原点 | |
| D. | 每次都让小球从相同的位置释放 |
查看答案和解析>>
科目:高中物理 来源: 题型:解答题
查看答案和解析>>
科目:高中物理 来源: 题型:解答题

查看答案和解析>>
科目:高中物理 来源: 题型:填空题

查看答案和解析>>
科目:高中物理 来源: 题型:选择题
 如图所示,三条平行且等间距的虚线表示电场中的三个等势面,其电势分别为10V、20V、30V.实线是一带负电的粒子(不计重力)在该区域内运动的轨迹,对于轨迹上的a、b、c三点,下列说法中正确的是( )
如图所示,三条平行且等间距的虚线表示电场中的三个等势面,其电势分别为10V、20V、30V.实线是一带负电的粒子(不计重力)在该区域内运动的轨迹,对于轨迹上的a、b、c三点,下列说法中正确的是( )| A. | 带电粒子一定是先过a,再到b,然后到c | |
| B. | 带电粒子在三点所受电场力的大小F1>F2>F3 | |
| C. | 带电粒子在三点速度的大小Va>Vb>Vc | |
| D. | 带电粒子在三 点电势能的大小Eb>Ea>Ec |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com