如图1,矩形MNPQ中,点E 、F、G、H分别在NP、PQ、QM、MN上,若
、F、G、H分别在NP、PQ、QM、MN上,若
 ,则称四边形EF
,则称四边形EF GH为矩形MNPQ的反射四边形.在图2、图3中,四边形ABCD为矩形,且
GH为矩形MNPQ的反射四边形.在图2、图3中,四边形ABCD为矩形,且
 ,
,
 .
.
(1)在图2、图3中,点E、F分别在BC、CD边上,图 2中的四边形EFGH是利用正方形网格在图上画出的矩形ABCD的反射四边形.请你利用正方形网格在图3上画出矩形ABCD的反射四边形EFGH;
2中的四边形EFGH是利用正方形网格在图上画出的矩形ABCD的反射四边形.请你利用正方形网格在图3上画出矩形ABCD的反射四边形EFGH;
(2)图2、图3中矩形ABCD的反射四边形EFGH的周长是否为定值?若是定值,请直接写出这个定值;若不是定值,请直接写出图2、图3中矩形ABCD的反射四边形EFGH的周长各是多少;
(3)图2、图3中矩形ABCD的反射四边形EFGH的面积是否为定值?若是定值,请直接写出这个定值;若不是定 值,请直接写出图2、图3中矩形ABCD的反射四边形EFGH的面积各是多少.
值,请直接写出图2、图3中矩形ABCD的反射四边形EFGH的面积各是多少.
 名校课堂系列答案
名校课堂系列答案科目:初中数学 来源: 题型:
如图,在平面直角坐标系中,O为坐标原点,点A、B的坐标分别为(8,0)、(0,6).动点Q从点O、动点P从点A同时出发,分别沿着OA方向、AB方向均以1个单位长度/秒的速度匀速运动,运动时间为t(秒)(0<t≤5).以P为圆心,PA长为半径的⊙P与AB、OA的另一个交点分别为点C、D,连结CD、QC.
(1)当t为何值时,点Q与点D重合?
(2)当
 t为何值时,DQ=2AD?
t为何值时,DQ=2AD?
(3)求线段QC所在直线与⊙P相切时t的值。
查看答案和解析>>
科目:初中数学 来源: 题型:
如图,在直角梯形ABCD中,AD∥CB, 
 ,动点P从点D出发,沿射线DA的方向以每秒2个单位长的速度运动,动点Q从点C出发,在线段CB上以每秒一个单位长的速度向点B运动,点P,Q分别从点D,C同时出发,当点Q运动到点B时,点P随之停止运动.设运动的时间为t
,动点P从点D出发,沿射线DA的方向以每秒2个单位长的速度运动,动点Q从点C出发,在线段CB上以每秒一个单位长的速度向点B运动,点P,Q分别从点D,C同时出发,当点Q运动到点B时,点P随之停止运动.设运动的时间为t (秒).
(秒).
(1)设△BPQ的面积为S,求S与t之间的函数关系式;
(2)当t为何值时,四边形ABQP是平行四 边形.
边形.
(3)当t为何值时,以B,P,Q三点为顶点的三角形是等腰三角形?
【
查看答案和解析>>
科目:初中数学 来源: 题型:
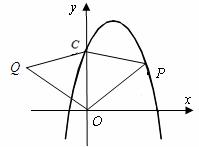
如图,在平面直角坐标系中,二次函数 的图象与y轴交于点C,点P是抛物线上的一个动点,点P关于y轴的对称点Q,连接PO,PC,QO,QC,得到四边形
的图象与y轴交于点C,点P是抛物线上的一个动点,点P关于y轴的对称点Q,连接PO,PC,QO,QC,得到四边形 ,是否存在点P,使四边形为菱形?若存在,求出此时点P的坐标;若不存在,请说明理由。
,是否存在点P,使四边形为菱形?若存在,求出此时点P的坐标;若不存在,请说明理由。
查看答案和解析>>
科目:初中数学 来源: 题型:
如图,等腰直角梯形ABCD中,∠ADC=∠BCD=90°,BC=CD=4,P为边AD上的一个动点,AE⊥BP,CF⊥BP,垂足分别为点E、F。证明:DE2+BF2=16。

查看答案和解析>>
科目:初中数学 来源: 题型:
根据指令[s, A](s≥0,0°<A≤360°),机器人在平面上完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向行走s个单位.现机器人在平面直角坐标系的原点,且面对x轴的正方向,如果输入
A](s≥0,0°<A≤360°),机器人在平面上完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向行走s个单位.现机器人在平面直角坐标系的原点,且面对x轴的正方向,如果输入
 指令为[1,45°],那么连续执行三次这样的指令,机器人
指令为[1,45°],那么连续执行三次这样的指令,机器人 所在位置的坐标是( )
所在位置的坐标是( )
A.(0, ) B.(
) B.( ,)
,) C.(,
C.(, ) D.(0,1+
) D.(0,1+ )
)
查看答案和解析>>
科目:初中数学 来源: 题型:
如图,抛物线 与x轴交于A、B两点(点A在点B的右侧),与y轴交于点C。若直线l过点E(﹣4,0),M为直线l上的动点
与x轴交于A、B两点(点A在点B的右侧),与y轴交于点C。若直线l过点E(﹣4,0),M为直线l上的动点 ,当以A、B、M为顶点所作的直角三角形有且只有三个时,求直线l的解析式.
,当以A、B、M为顶点所作的直角三角形有且只有三个时,求直线l的解析式.
查看答案和解析>>
科目:初中数学 来源: 题型:
已知点A(0,0),B(0,3),C(4,t+3),D(4,t). 记N(t)为□ABCD内部(不含边界)整点的个数,其中整点是指横坐标和纵坐标都是整数的点,则N(t)所有可能的值为【 】
A.6、7 B.7 、8 C.6、7、8 D.6、8、9
、8 C.6、7、8 D.6、8、9
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
 ;(3)不是定值,分别是16、12
;(3)不是定值,分别是16、12
 析题意,读懂题中“反射四边形”的特征即可作出图形;
析题意,读懂题中“反射四边形”的特征即可作出图形;