科目: 来源: 题型:
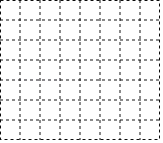
【题目】如图,正方形网格中的每个小正方形的边长都是1,每个小正方形的顶点叫做格点.△ABC的三个顶点A,B,C都在格点上.将△ABC绕点A按顺时针方向旋转90°得到△AB′C′.
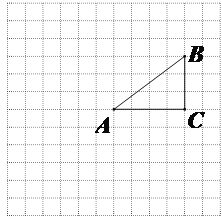
(1)在正方形网格中,画出△AB′C′;
(2)计算线段AB在变换到AB′的过程中扫过的区域的面积.
查看答案和解析>>
科目: 来源: 题型:
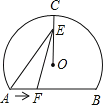
【题目】如图,点C是⊙O优弧ACB上的中点,弦AB=8cm,E为OC上任意一点,动点F从点A出发,以每秒1cm的速度沿AB方向向点B匀速运动,若y=AE2﹣EF2,则y与动点F的运动时间x(0≤x≤4)秒的函数关系式为( )
A.![]() B.
B.![]() C.
C.![]() D.
D.![]()
查看答案和解析>>
科目: 来源: 题型:
【题目】抛物线y=﹣x2+bx+c上部分点的横坐标x,纵坐标y的对应值如下表:
x | … | ﹣2 | ﹣1 | 0 | 1 | 2 | … |
y | … | 0 | 4 | 6 | 6 | 4 | … |
从上表可知,下列说法正确的个数是( )
①抛物线与x轴的一个交点为(﹣2,0);
②抛物线与y轴的交点为(0,6);
③抛物线的对称轴是x=1;
④在对称轴左侧y随x增大而减小;
⑤当y>0,则x的取值范围是-2<x<3
A.①②③B.②③④C.②④⑤D.①②⑤
查看答案和解析>>
科目: 来源: 题型:
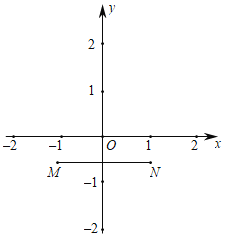
【题目】M(﹣1,![]() ),N(1,
),N(1,![]() )是平面直角坐标系xOy中的两点,若平面内直线MN上方的点P满足:45°≤∠MPN≤90°,则称点P为线段MN的可视点.
)是平面直角坐标系xOy中的两点,若平面内直线MN上方的点P满足:45°≤∠MPN≤90°,则称点P为线段MN的可视点.
(1)在点![]() ,
,![]() ,
,![]() ,A4(2,2)中,线段MN的可视点为 ;
,A4(2,2)中,线段MN的可视点为 ;
(2)若点B是直线y=x![]() 上线段MN的可视点,求点B的横坐标t的取值范围;
上线段MN的可视点,求点B的横坐标t的取值范围;
(3)直线y=x+b(b≠0)与x轴交于点C,与y轴交于点D,若线段CD上存在线段MN的可视点,直接写出b的取值范围.
查看答案和解析>>
科目: 来源: 题型:
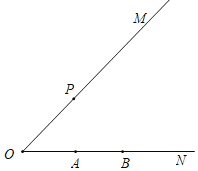
【题目】∠MON=45°,点P在射线OM上,点A,B在射线ON上(点B与点O在点A的两侧),且AB=1,以点P为旋转中心,将线段AB逆时针旋转90°,得到线段CD(点C与点A对应,点D与点B对应).
(1)如图,若OA=1,OP![]() ,依题意补全图形;
,依题意补全图形;
(2)若OP![]() ,当线段AB在射线ON上运动时,线段CD与射线OM有公共点,求OA的取值范围;
,当线段AB在射线ON上运动时,线段CD与射线OM有公共点,求OA的取值范围;
(3)一条线段上所有的点都在一个圆的圆内或圆上,称这个圆为这条线段的覆盖圆.若OA=1,当点P在射线OM上运动时,以射线OM上一点Q为圆心作线段CD的覆盖圆,直接写出当线段CD的覆盖圆的直径取得最小值时OP和OQ的长度.
查看答案和解析>>
科目: 来源: 题型:
【题目】在平面直角坐标系xOy中,抛物线y=ax2﹣2a2x(a≠0)的对称轴与x轴交于点P.
(1)求点P的坐标(用含a的代数式表示);
(2)记函数![]() (﹣1≤x≤3)的图象为图形M,若抛物线与图形M恰有一个公共点,结合函数的图象,求a的取值范围.
(﹣1≤x≤3)的图象为图形M,若抛物线与图形M恰有一个公共点,结合函数的图象,求a的取值范围.
查看答案和解析>>
科目: 来源: 题型:
【题目】某部门为新的生产线研发了一款机器人,为了了解它的操作技能情况,在相同条件下与人工操作进行了抽样对比.过程如下,请补充完整.
收集数据对同一个生产动作,机器人和人工各操作20次,测试成绩(十分制)如下:
机器人 | 8.0 | 8.1 | 8.1 | 8.1 | 8.2 | 8.2 | 8.3 | 8.4 | 8.4 | 9.0 |
9.0 | 9.0 | 9.1 | 9.1 | 9.4 | 9.5 | 9.5 | 9.5 | 9.5 | 9.6 | |
人工 | 6.1 | 6.2 | 6.6 | 7.2 | 7.2 | 7.5 | 8.0 | 8.2 | 8.3 | 8.5 |
9.1 | 9.6 | 9.8 | 9.9 | 9.9 | 9.9 | 10 | 10 | 10 | 10 |
整理、描述数据按如下分段整理、描述这两组样本数据:
成绩x 人数 生产方式 | 6≤x<7 | 7≤x<8 | 8≤x<9 | 9≤x≤10 |
机器人 | 0 | 0 | 9 | 11 |
人工 |
|
|
|
(说明:成绩在9.0分及以上为操作技能优秀,8.0~8.9分为操作技能良好,6.0~7.9分为操作技能合格,6.0分以下为操作技能不合格)
分析数据两组样本数据的平均数、中位数、众数和方差如下表所示:
平均数 | 中位数 | 众数 | 方差 | |
机器人 | 8.8 | 9.0 | 9.5 | 0.333 |
人工 | 8.6 | 8.8 | 10 | 1.868 |
得出结论
(1)如果生产出一个产品,需要完成同样的操作200次,估计机器人生产这个产品达到操作技能优秀的次数为 ;
(2)请结合数据分析机器人和人工在操作技能方面各自的优势: .
查看答案和解析>>
科目: 来源: 题型:
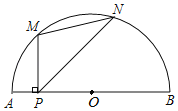
【题目】如图,P是半圆O中![]() 所对弦AB上一动点,过点P作PM⊥AB交
所对弦AB上一动点,过点P作PM⊥AB交![]() 于点M,作射线PN交
于点M,作射线PN交![]() 于点N,使得∠NPB=45°,连接MN.已知AB=6cm,设A,P两点间的距离为xcm,M,N两点间的距离为ycm.(当点P与点A重合时,点M也与点A重合,当点P与点B重合时,y的值为0)
于点N,使得∠NPB=45°,连接MN.已知AB=6cm,设A,P两点间的距离为xcm,M,N两点间的距离为ycm.(当点P与点A重合时,点M也与点A重合,当点P与点B重合时,y的值为0)
小超根据学习函数的经验,对函数y随自变量x的变化而变化的规律进行了探究.
下面是小超的探究过程,请补充完整:
(1)按照下表中自变量x的值进行取点、画图、测量,得到了y与x的几组对应值;
x/cm | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
y/cm | 4.2 | 2.9 | 2.6 | 2.0 | 1.6 | 0 |
(说明:补全表格时相关数值保留一位小数)
(2)建立平面直角坐标系,描出以补全后的表中各对对应值为坐标的点,画出该函数的图象;
(3)结合画出的函数图象,解决问题:当MN=2AP时,AP的长度约为 cm.
查看答案和解析>>
科目: 来源: 题型:
【题目】在平面直角坐标系xOy中,反比例函数y![]() 的图象经过点P(3,4).
的图象经过点P(3,4).
(1)求k的值;
(2)求OP的长;
(3)直线y=mx(m≠0)与反比例函数的图象有两个交点A,B,若AB>10,直接写出m的取值范围.
查看答案和解析>>
科目: 来源: 题型:
【题目】如图,△ABC内接于以AB为直径的⊙O,过点A作⊙O的切线,与BC的延长线相交于点D,在CB上截取CE=CD,连接AE并延长,交⊙O于点F,连接CF.
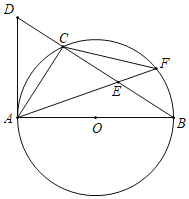
(1)求证:AC=CF;
(2)若AB=4,sinB![]() ,求EF的长.
,求EF的长.
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com